Park to Clarke Angle Transform
Implement dq0 to αβ0 transform

Libraries:
Simscape /
Electrical /
Control /
Mathematical Transforms
Description
The Park to Clarke Angle Transform block converts the direct, quadrature, and zero components in a rotating reference frame to alpha, beta, and zero components in a stationary reference frame.
The block accepts the following inputs:
Either d-q axes components or multiplexed components dq0 in the rotating reference frame. Use the Number of inputs parameter to use either two or three inputs.
Sine and cosine values of the corresponding angles of transformation.
For balanced systems, the zero components are equal to zero.
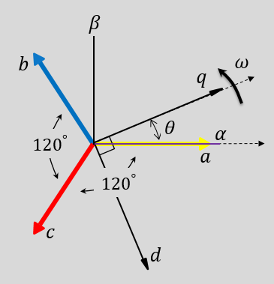
You can configure the block to align the phase a-axis of the three-phase system to either the q- or d-axis of the rotating reference frame at time, t = 0. The figures show the direction of the magnetic axes of the stator windings in the three-phase system, a stationary αβ0 reference frame, and a rotating dq0 reference frame where:
The a-axis and the q-axis are initially aligned.
The a-axis and the d-axis are initially aligned.
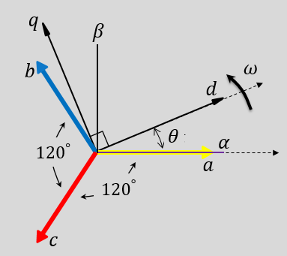
In both cases, the angle θ = ωt, where
θ is the angle between the a and q axes for the q-axis alignment or the angle between the a and d axes for the d-axis alignment.
ω is the rotational speed of the d-q reference frame.
t is the time, in s, from the initial alignment.
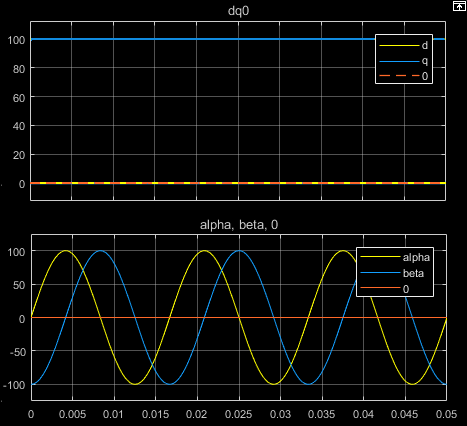
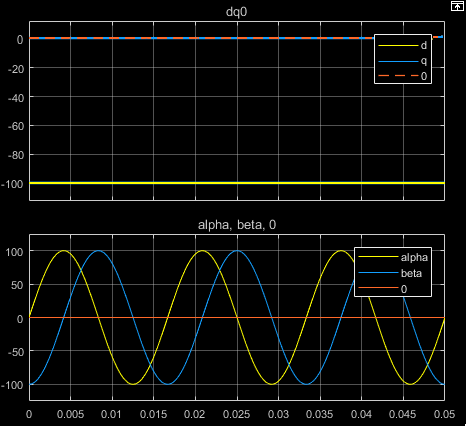
The figures show the time-response of the individual components of equivalent balanced dq0 and αβ0 for an:
Alignment of the a-phase vector to the q-axis
Alignment of the a-phase vector to the d-axis
Equations
The Park to Clarke Angle Transform block implements the transform for an a-phase to q-axis alignment as
where:
d and q are the direct-axis and quadrature-axis components of the two-axis system in the rotating reference frame.
0 is the zero component.
α and β are the alpha-axis and beta-axis components of the two-phase system in the stationary reference frame.
For an a-phase to d-axis alignment, the block implements the transform using this equation:
Ports
Input
Output
Parameters
References
[1] Krause, P., O. Wasynczuk, S. D. Sudhoff, and S. Pekarek. Analysis of Electric Machinery and Drive Systems. Piscatawy, NJ: Wiley-IEEE Press, 2013.