Yo-Yo Control of Satellites
This example shows how to model the control system in a tethered satellite system. The satellite system consists of a small satellite attached by a long tether to an orbiting platform. When the tethered satellite oscillates, it behaves like a pendulum that exhibits too much libration. To stabilize the pendulum, the control system changes the length of the tether by reeling it out to its maximum length when the satellite is in the middle of its arc (which decreases its angular acceleration) and by reeling it in when the satellite has an angular velocity equal to zero.

Stateflow® is used to control when the tether is reeled in or reeled out using input events from Simulink®.
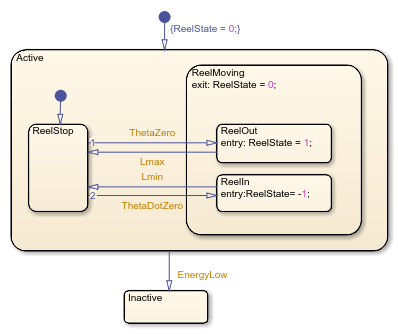
When the satellite is in the middle of its swing ( ), the state
), the state ReelOut becomes active. When the satellite has been reeled out as far as it can, the state ReelStop becomes active. When the angular velocity of the satellite reaches zero, the ReelIn state becomes active. When the tether is as short as possible, the ReelStop state becomes active once again. Finally, if the total energy of the satellite is too low, the system is deactivated by entering the Inactive state.

References
[1] Dabney, James B. and Harman, Thomas L. Mastering Simulink, 2003.