parse
Description
traj = parse(parser,mission)traj for a multirotor or fixed-wing
UAV following the mission mission. The
parse function generates the reference trajectory in a local
north-east-down (NED) frame with its origin at the global coordinates specified by the
HomeLocation property of mission.
traj = parse(parser,mission,refLocation)refLocation.
Examples
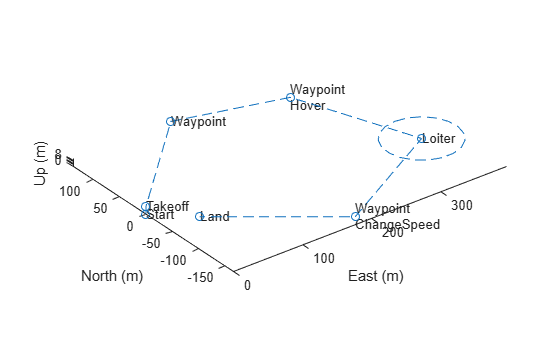
Create a UAV mission by using the flight plan stored in a .plan file and show the mission.
mission = uavMission(PlanFile="flight.plan"); show(mission); axis equal
Create parsers for a multirotor UAV and a fixed-wing UAV.
mrmParser = multirotorMissionParser(TransitionRadius=2,TakeoffSpeed=2); fwmParser = fixedwingMissionParser(TransitionRadius=15,TakeoffPitch=10);
Generate one flight trajectory using each parser.
mrmTraj = parse(mrmParser,mission); fwmTraj = parse(fwmParser,mission);
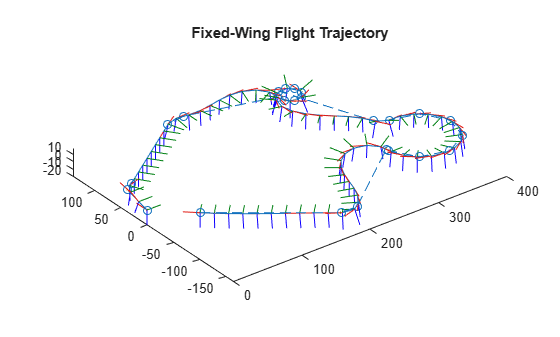
Visualize the waypoints, flight trajectory and body frames for each UAV.
figure show(mrmTraj,FrameSize=20,NumSamples=75); title("Multirotor Flight Trajectory") axis equal
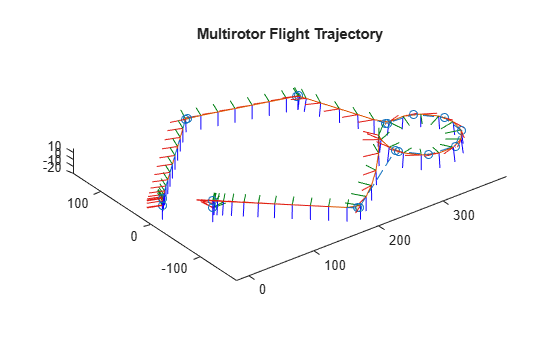
figure show(fwmTraj,FrameSize=20,NumSamples=75); title("Fixed-Wing Flight Trajectory") axis equal
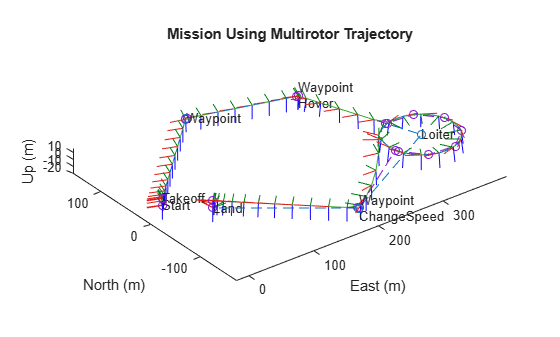
Plot the mission, waypoints, flight trajectory and UAV body frames in the same plot for each UAV.
figure show(mission); hold on show(mrmTraj,FrameSize=20,NumSamples=75); hold off title("Mission Using Multirotor Trajectory") axis equal
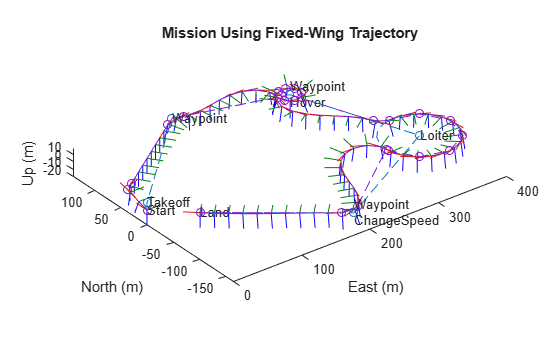
show(mission); hold on show(fwmTraj,FrameSize=20,NumSamples=75); hold off title("Mission Using Fixed-Wing Trajectory") axis equal
Input Arguments
Output Arguments
Version History
Introduced in R2022b