show
Description
ax = show(mission)ax.
Note
If the waypoint reference frame of the mission is
"Global" or "GlobalRelativeAlt", then the
show function converts the waypoint geodetic coordinates to
local ENU coordinates by assuming the earth is ellipsoidal using the WGS84 reference
ellipsoid.
ax = show(___,Name=Value)show(mission,ReferenceLocation=[42.35 -71.05 10]) shows the mission in
ENU coordinate system with origin set to the coordinate of 42.35 degrees north, 71.05
degrees west, and at an altitude of 10 meters.
Examples
Create a UAV mission object with a home location at the origin of the local ENU coordinate frame and an initial speed of 5 meters per second.
m = uavMission(Frame="LocalENU",HomeLocation=[0 0 0],Speed=5)m =
uavMission with properties:
HomeLocation: [0 0 0]
InitialYaw: 0
Frame: "LocalENU"
Speed: 5
NumMissionItems: 0
Add a takeoff mission item to the mission with an altitude of 25 meters, pitch of 15 degrees, and yaw of 0 degrees.
addTakeoff(m,20,Pitch=15,Yaw=0);
Add two waypoint mission items to the mission. Between the two waypoints, increase the speed of the UAV to 20 meters per second. After the second waypoint, reduce the speed of the UAV back to 5 meters per second.
addWaypoint(m,[10 0 30]); addChangeSpeed(m,20) addWaypoint(m,[20 0 40]); addChangeSpeed(m,5) addWaypoint(m,[30 0 50])
Add loiter and hover mission items to the mission, specifying for the UAV to loiter and hover around the second waypoint at a radius of 50 meters for 20 seconds each.
addLoiter(m,[40 0 60],10,20); addHover(m,[50 0 70],10,20);
Add a landing mission item to the mission to land the UAV.
addLand(m,[70 0 0],Yaw=0);
Show the mission item data table.
showdetails(m)
ans=9×17 table
Idx Timestamp MissionType ParameterName1 ParameterValue1 ParameterName2 ParameterValue2 ParameterName3 ParameterValue3 ParameterName4 ParameterValue4 ParameterName5 ParameterValue5 ParameterName6 ParameterValue6 ParameterName7 ParameterValue7
___ _________ _____________ ______________ _______________ ______________ _______________ ______________ _______________ ______________ _______________ __________________ _______________ ______________ _______________ ______________ _______________
1 NaN "Takeoff" "Altitude" 20 "Pitch" 15 "Yaw" 0 "" NaN "" NaN "" NaN "" NaN
2 NaN "Waypoint" "X" 10 "Y" 0 "Z" 30 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
3 NaN "ChangeSpeed" "Speed" 20 "" NaN "" NaN "" NaN "" NaN "" NaN "" NaN
4 NaN "Waypoint" "X" 20 "Y" 0 "Z" 40 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
5 NaN "ChangeSpeed" "Speed" 5 "" NaN "" NaN "" NaN "" NaN "" NaN "" NaN
6 NaN "Waypoint" "X" 30 "Y" 0 "Z" 50 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
7 NaN "Loiter" "X" 40 "Y" 0 "Z" 60 "Radius" 10 "Duration" 20 "" NaN "" NaN
8 NaN "Hover" "X" 50 "Y" 0 "Z" 70 "Radius" 10 "Duration" 20 "" NaN "" NaN
9 NaN "Land" "X" 70 "Y" 0 "Z" 0 "Yaw" 0 "" NaN "" NaN "" NaN
Remove the hover action at index 7, and then add another waypoint at index 8 after the hover item moves to index 7. Show the mission details table again to see the changes.
removeItem(m,7); addWaypoint(m,[65 0 70],InsertAtRow=8); showdetails(m)
ans=9×17 table
Idx Timestamp MissionType ParameterName1 ParameterValue1 ParameterName2 ParameterValue2 ParameterName3 ParameterValue3 ParameterName4 ParameterValue4 ParameterName5 ParameterValue5 ParameterName6 ParameterValue6 ParameterName7 ParameterValue7
___ _________ _____________ ______________ _______________ ______________ _______________ ______________ _______________ ______________ _______________ __________________ _______________ ______________ _______________ ______________ _______________
1 NaN "Takeoff" "Altitude" 20 "Pitch" 15 "Yaw" 0 "" NaN "" NaN "" NaN "" NaN
2 NaN "Waypoint" "X" 10 "Y" 0 "Z" 30 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
3 NaN "ChangeSpeed" "Speed" 20 "" NaN "" NaN "" NaN "" NaN "" NaN "" NaN
4 NaN "Waypoint" "X" 20 "Y" 0 "Z" 40 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
5 NaN "ChangeSpeed" "Speed" 5 "" NaN "" NaN "" NaN "" NaN "" NaN "" NaN
6 NaN "Waypoint" "X" 30 "Y" 0 "Z" 50 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
7 NaN "Hover" "X" 50 "Y" 0 "Z" 70 "Radius" 10 "Duration" 20 "" NaN "" NaN
8 NaN "Waypoint" "X" 65 "Y" 0 "Z" 70 "Yaw" NaN "AcceptanceRadius" NaN "" NaN "" NaN
9 NaN "Land" "X" 70 "Y" 0 "Z" 0 "Yaw" 0 "" NaN "" NaN "" NaN
Visualize the mission.
show(m);
axis equal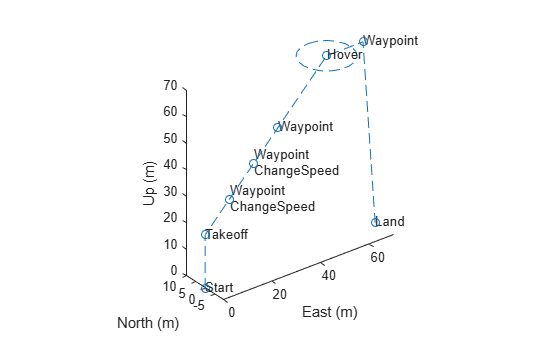
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022b
See Also
Objects
Functions
addChangeSpeed|addHover|addLand|addLoiter|addTakeoff|addWaypoint|removeItem|showdetails