Applications
Explore technology solutions across various applications, from robotics to AI.
Academic Disciplines
Discover engineering and science resources for teaching and research.
Industries
Learn how MATLAB and Simulink support industry-specific workflows and standards.
Capabilities
Find features and capabilities from code generation to hardware support.
Release Highlights
See what's new in the latest release of MATLAB and Simulink
Training
Events
Learning Resources
Visit the Help Center to explore product documentation, engage with community forums, check release notes, and more.
MATLAB and Simulink Videos
Learn about products, watch demonstrations, and explore what's new.
Company
Careers
Decarbonizing MathWorks
See how MathWorks is protecting and restoring Earth's resources.
Search
Videos
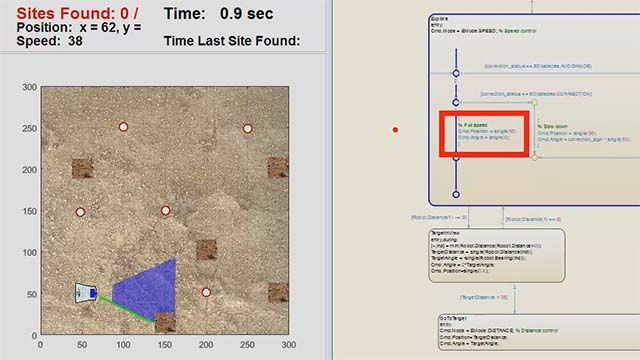
From the series: Mission on Mars Robot Challenge
You’ll learn to control the Rover robot using distance and speed commands.
Published: 11 Mar 2016
Bridging Wireless Communications Design and Testing with MATLAB
Feedback
Featured Product
How to Build a Stateflow Chart
Quick Start Guide to the 2016 Mission on Mars Robot...
Building a Position Estimator for a Robot | Mission on Mars...
How to Create Different Scenarios | Mission on Mars Robot...
How to Build a Stateflow Chart | Mission on Mars Robot...
Description of the Initial Algorithm | Mission on Mars...
View more related videos
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
Europe
Asia Pacific
Contact your local office