Model-Based Control of Humanoid Walking
From the series: Modeling, Simulation, and Control
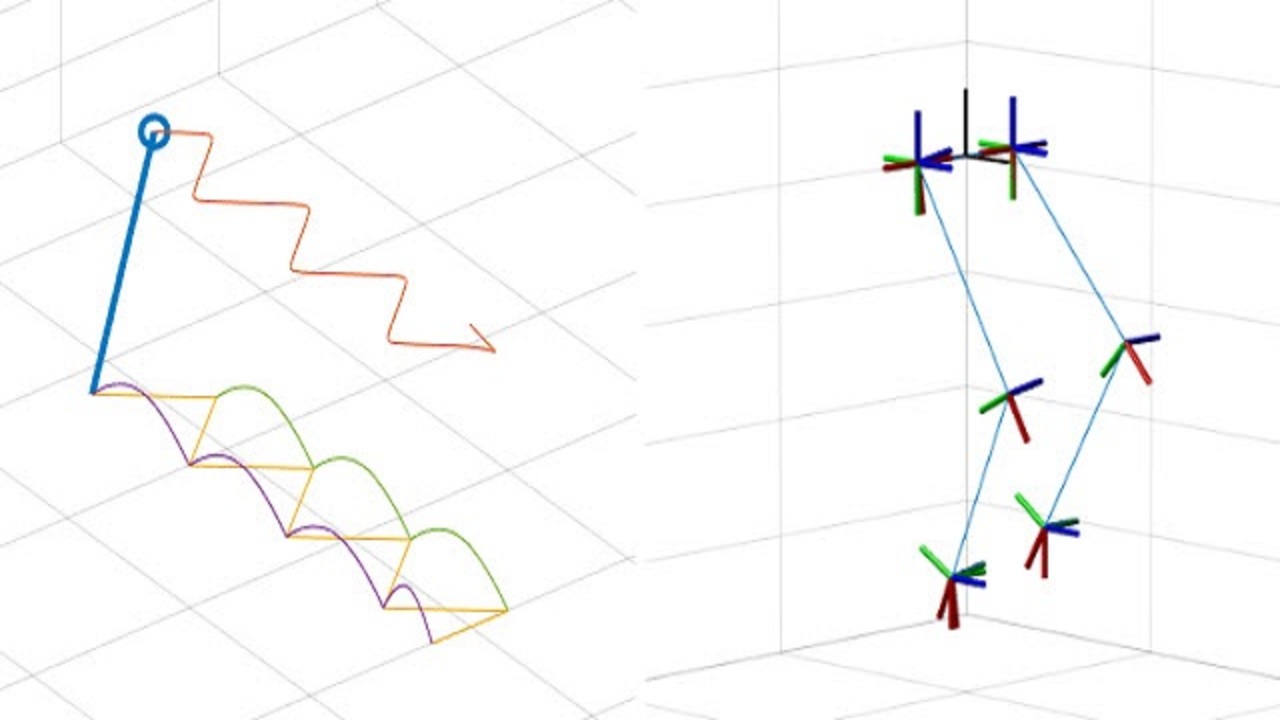
Brian Kim and Sebastian Castro discuss the theoretical foundations of humanoid walking using the linear inverted pendulum model (LIPM) with MATLAB® and Simulink®.
First, Brian and Sebastian introduce the basics of generating a stable walking pattern with the linear inverted pendulum model. Then, they create a trajectory plan for the individual footsteps of a bipedal robot and apply inverse kinematics to calculate the necessary actuator motion to realize this pattern. Finally, they test the walking pattern on a 3D rigid body model of the humanoid robot created in Simscape Multibody™.
You can find the example models used in this video in the MATLAB Central File Exchange.
For more information, you can access the following resources:
Published: 22 Nov 2019











Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)