Vom virtuellen Fahrzeug bis zum vollelektrischen Offroad-UTV in weniger als einem Jahr
Ein umweltfreundlicheres vollelektrisches Utility Task Vehicle
Der Brawley™ von Vanderhall Motor Works ist ein vollelektrisches Utility Task Vehicle (UTV). Bei den auch als „Side-by-Side“ bekannten UTVs handelt es sich um Geländefahrzeuge, die bei Freizeitnutzern ebenso beliebt sind wie bei Landwirten und Jägern. Mit einer Leistung von 307 PS und 225 Kilometern Reichweite bietet der Brawley seinen Insassen eine leistungsstarke, dabei aber auch umweltschonende Fahrt über Sanddünen und felsiges Gelände.
Am Anfang des Entwurfsprozesses sah sich das Team von Vanderhall mit seinen ganz eigenen Hürden konfrontiert. Die konventionellen Fahrzeuge von Vanderhall mit Benzinmotor basierten auf einem Antrieb von General Motors®. Die Ingenieure tauschten zunächst den Verbrennungsmotor durch die Antriebshardware und -software eines anderen Herstellers aus. Obwohl elektrische Antriebe durch die geringere Anzahl an Komponenten – nur Batterie, Wechselrichter und Elektromotor – einfacher gestaltet sind, hat die Integration der separaten Systeme nicht so gut funktioniert, wie es die Ingenieure erwartet hatten.
„Der elektrische Antrieb musste mit allen anderen Modulen und Steuerungen von General Motors kommunizieren, zum Beispiel der Servolenkung und dem Antiblockiersystem“, sagt Christopher Johnson, CTO von Vanderhall. „Keine der Komponenten kommunizierte zufriedenstellend. Letztendlich hatten wir ein Fahrzeug, das schwer zu fahren war.“
Vanderhall entschied sich für eine komplette Neuentwicklung eines Antriebs, eines Motorsteuerungssystem und eines Antiblockiersystems – eine gewaltige Aufgabe für ein kleines, privat finanziertes Start-up mit wenigen Ingenieuren. Das Ingenieurteam erkannte, dass es entscheidend war, seine Regelungsalgorithmen virtuell zu entwickeln und zu testen, um das Fehlerrisiko zu minimieren, als es mit der Integration der Software und Hardware begann und Code auf einem echten Geländefahrzeug bereitstellte.

Der Brawley Vanderhall Motor Works, ein vollelektrisches Utility Task Vehicle. (Bildquelle: Vanderhall Motor Works)
„Normalerweise würde eine ganze Armee von Programmierern Jahre brauchen, um die Software für ein Fahrzeugsteuerungssystem zu schreiben. Der Markt für Elektrofahrzeuge entwickelt sich rasend schnell. Mit einem konventionellen Entwicklungsansatz würden wir noch heute nur von einem Produkt träumen und all unsere Konkurrenten wären uns meilenweit voraus.“
Das Team entwickelte mithilfe von Simulink® ein Fahrzeugmodell. Eine Partnerschaft mit dem Halbleiterhersteller NXP Semiconductor ermöglichte ihm eine schnelle Übersetzung des Simulink-Codes für die Ausführung auf NXP®-Automobil-Chips, um vor der Durchführung von Tests auf einem virtuellen Fahrzeug die Fahrzeugdynamik zu simulieren und das Fahrzeugverhalten zu prognostizieren. Mit Model-Based Design konnte eine Gruppe aus drei Ingenieuren bei Vanderhall den Prototypen des Brawley innerhalb von nur acht Monaten entwickeln, simulieren und bereitstellen. (NXP ist eine Marke von NXP B.V.)
„Normalerweise würde eine ganze Armee von Programmierern Jahre brauchen, um die Software für ein Fahrzeugsteuerungssystem zu schreiben“, sagt Johnson. „Der Markt für Elektrofahrzeuge entwickelt sich rasend schnell. Mit einem konventionellen Entwicklungsansatz würden wir noch heute nur von einem Produkt träumen, und alle unsere Konkurrenten wären uns meilenweit voraus.“
Schnellere Softwareentwicklung
„Das Vehicle Dynamics Blockset bietet eine unglaubliche Flexibilität, die uns die Entwicklung neuartiger Funktionen für das Fahrzeug ermöglicht. Damit können wir alle möglichen coolen Tricks durchführen, indem wir die Leistung, Drehzahl und Geschwindigkeit jedes Rads einzeln steuern.“
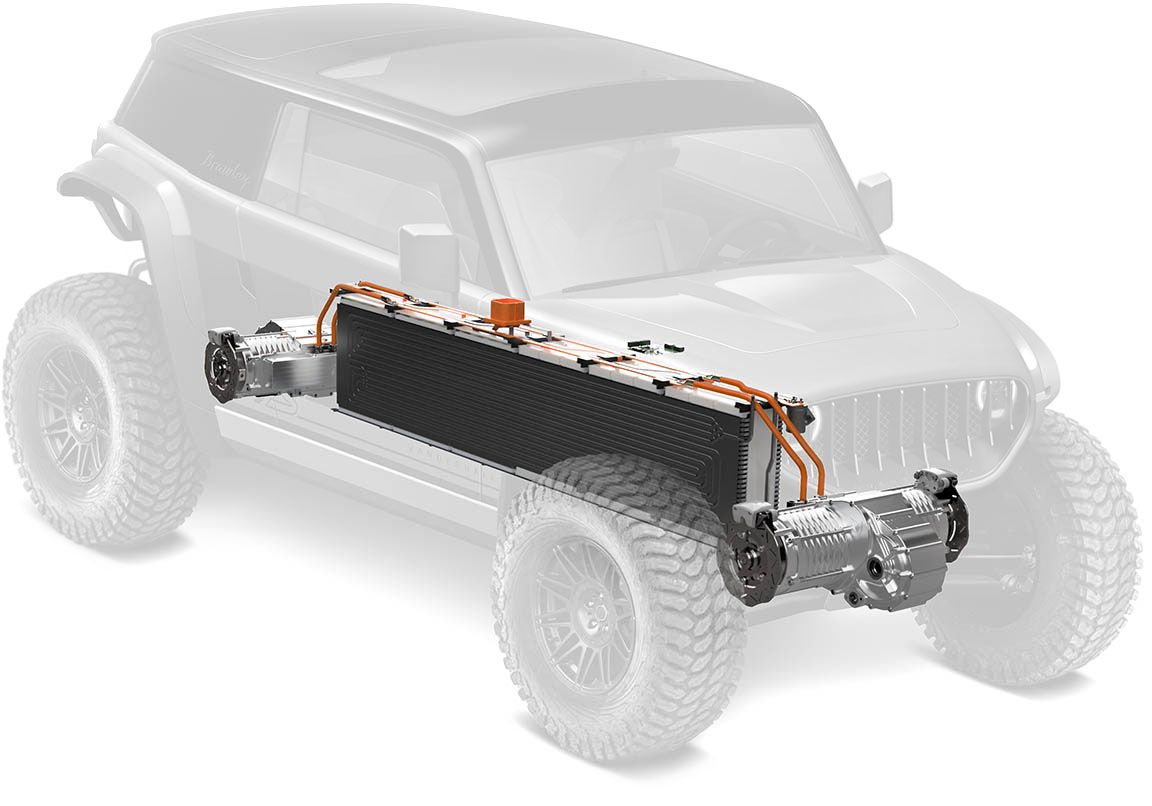
Der Antrieb des Brawley verfügt über einen Motor für jedes Rad und weitere Alleinstellungsmerkmale. (Bildquelle: Vanderhall Motor Works)
Das elektrische UTV Brawley hebt sich durch eine Reihe von Merkmalen, insbesondere seine vier Elektromotoren (je ein Motor für jedes seiner 35-Zoll-Räder), von der Konkurrenz ab. Johnson und sein Team wussten schon frühzeitig, dass sie jeden Motor direkt steuern müssen würden, um ein dynamisches und aufregendes UTV-Erlebnis zu ermöglichen. Damit kann das UTV schnell auf rauen unbefestigten Straßen fahren, scharfe Kurven schnell nehmen und Sprünge bewältigen.
Der Hersteller des elektrischen Antriebs konnte dieser Anforderung nicht nachkommen: Er zeigte sich unwillig, Änderungen an seiner Hardware vorzunehmen, und codierte Regelungsalgorithmen manuell, was eine Überarbeitung der Software schwierig machte.
Johnson beschloss, die Antriebshardware intern zu entwickeln und Systemparameter wie die Größe der Batterie, die Art des Elektromotors und die Systemspannung selbst zu bestimmen. Nachdem ihnen ein Hardwareentwurf und die Testhardware vorlagen, mussten die Ingenieure das Antiblockiersystem, eine Motorsteuerungseinheit zur Bestimmung der Geschwindigkeit und des Drehmoments sowie eine elektronische Stabilitätskontrolle entwickeln, die die Bremsen der einzelnen Räder steuert, um Schleudern und Kontrollverlust in scharfen Kurven zu verhindern. Eine manuelle Codierung der Steuerungssoftware war keine Option, da Vanderhall das Fahrzeug schnell auf den Markt bringen wollte. Daher entschied sich Johnsons Team für Model-Based Design.
Die Ingenieure nutzten Simulink für den Entwurf und die Entwicklung ihrer Fahrzeugsteuerungssoftware. Sie modellierten mit dem Vehicle Dynamics Blockset™ die Bewegung und das Ansprechverhalten des UTV, womit sie den Bremsweg fein abstimmen und die Motordrehzahl bestimmen konnten, bei der die Räder die Traktion verloren.
Durch den Entwurf eines Antriebs mit einem Motor pro Rad konnten die Ingenieure dem Fahrzeug eine Reihe von Alleinstellungsmerkmalen verleihen. So basiert beispielsweise das unternehmenseigene Antiblockiersystem nicht auf dem wiederholten Öffnen und Schließen von Druckventilen, um ein Blockieren der Räder zu verhindern. Stattdessen wird mit dem Elektromotor jedes einzelnen Rads das Drehmoment so angepasst, dass ein Blockieren vermieden wird. Dieser Prozess ermöglicht ein hochgradig kontrolliertes Bremsen.
„Das Vehicle Dynamics Blockset bietet eine unglaubliche Flexibilität, die uns die Entwicklung neuartiger Funktionen für das Fahrzeug ermöglicht. Damit können wir alle möglichen coolen Tricks durchführen, indem wir die Leistung, Drehzahl und Geschwindigkeit jedes Rads einzeln steuern“, sagt Johnson. „Zur Steuerung dieser Räder wird ein Modell benötigt, eine physikalische Gleichung des Fahrzeugverhaltens. Weiß man beispielsweise, wie viel der Brawley wiegt, oder kennt den Reibungskoeffizienten zwischen Gummi und Straße, kann man modellieren, wie stark das Fahrzeug beschleunigen wird oder wie schnell sich ein Rad auf Basis des angelegten Drehmoments drehen wird.“
Im Anschluss an die Entwicklung der Software für die Motorsteuerung und des Antiblockiersystems musste das Team diese in Kombination mit der Batterie testen. Mithilfe des Powertrain Blockset™ simulierte es den Ladezustand (SOC) der Batterie – ein entscheidender Wert für ein vollelektrisches UTV. Lithium-Batterien sind nichtlinear, und ihr Ladezustand ändert sich in einem Fahrzeug dynamisch, so Johnson. „Beim Beschleunigen verringert sich die Spannung, weil viel Energie aus den Batterien gezogen wird, auch wenn sich die Kapazität nicht wesentlich geändert hat. Die Schätzung des tatsächlichen SOC in einem System, in dem sich sämtliche Messwerte ständig verändern, ist sehr schwierig, und genau an dieser Stelle war das Powertrain Blockset äußerst nützlich.“
Das Team entwickelte mit Simulink ein virtuelles Fahrzeug für Echtzeitsimulationen des Antriebs und der Fahrzeugdynamik sowie zur Bewertung des Verhaltens der Regelungsalgorithmen.
Das Ingenieurteam simulierte eine Reihe von Extremfällen, zum Beispiel was passiert, wenn das Fahrzeug ein Notfallmanöver durchführt oder wenn eine Hochspannungsbatterie überhitzt, und implementierte seine Regelungsalgorithmen dementsprechend. Dies machte ein genaues Gefühl für das Verhalten des Fahrzeugs unter realen Bedingungen möglich, ohne physische Tests zu erfordern.
„Wir müssen nicht bei jeder Code-Revision umfangreiche Tests unter realen Bedingungen durchführen, weil wir über eine gute Simulation der Fahrzeugdynamik verfügen und sehen können, ob unser Code etwas überkorrigiert, sodass sich das Fahrzeug beispielsweise überschlägt“, führt Johnson aus. „Wir prüfen die Traktionskontrolle, die Stabilitätskontrolle und den Bremsweg. Mit dem virtuellen Fahrzeug können wir den Prozess beschleunigen und all diese Fälle mit weniger Personal und weniger physischen Fahrzeugen testen.“
Vorteile für alle Beteiligten
Durch Model-Based Design wurde es Vanderhall ermöglicht, die Softwareentwicklung vorzuziehen, bevor die gesamte Fahrzeughardware verfügbar war. Dasselbe Kernentwicklungsteam war es auch, welches das Konzept von der übergeordneten Code-Architektur zur Implementierung und zu Tests auf einem Prozessorchip brachte.
Schon wenige Wochen nach dem Beginn der Softwareentwicklung war das Team von Vanderhall bereit, seinen Code auf Hardware zu testen. Hierzu nutzte es Embedded Coder® zur Generierung von C Code, der auf einem Fahrzeugsteuerungs-Mikroprozessor ausgeführt werden konnte.
Das war Anfang 2020, und die pandemiebedingten Lockdowns fingen gerade an, die Halbleiterindustrie auszubremsen. „Wir taten uns mit NXP zusammen, um ihren Automobil-Prozessor, ihre Mikroprozessoren für Motorsteuerungen und ihr Linkpaket nutzen zu können“, sagt Johnson.
NXP fertigte mit dem MPC5777C nicht nur einen leistungsstarken Mikroprozessor für die Entwicklung in der Automobilindustrie, sondern bot Vanderhall mit seiner Model-Based Design Toolbox auch eine einfache Möglichkeit, den Simulink-Entwurf mit dem NXP-Prozessor zu verbinden.
Razvan Chivu, Manager der Model-Based Design Toolbox-Abteilung bei NXP, sagt, die meisten seiner Kunden in der Automobil- und Fahrzeugindustrie nutzten Simulink. „Es ist uns sehr wichtig, eine Möglichkeit zu haben, mit der wir alles, was sie in Simulink haben, mit NXP-Hardware verknüpfen können, um ihnen die Arbeit zu erleichtern. Das wichtigste Argument für die Model-Based Design Toolbox ist ihre Fähigkeit, als Brücke zwischen dem Ökosystem von MathWorks und dem Ökosystem von NXP zu dienen.“
Dieser Brücke ist es zu verdanken, dass die Ingenieure von Vanderhall ihre Software frühzeitig und häufig testen. Dies erleichtert den Übergang vom virtuellen Fahrzeug zu Processor-in-the-Loop-Tests und beschleunigt die Entwicklung von Prototypen. Vanderhall testet derzeit seine Serienantriebe und führt Testfahrten mit Vorserienfahrzeugen durch. Bis der Brawley serienreif ist, werden noch einige Monate vergehen, in denen seine Strapazierfähigkeit getestet und der Steuercode verfeinert werden, so Johnson. Und wenn er so weit ist, werden ihm die Hindernisse nichts ausmachen – der Brawley wird sie stilsicher überwinden.
„Es ist uns sehr wichtig, eine Möglichkeit zu haben, mit der wir alles, was sie in Simulink haben, mit NXP-Hardware verknüpfen können, um ihnen die Arbeit zu erleichtern. Das wichtigste Argument für die Model-Based Design Toolbox ist ihre Fähigkeit, als Brücke zwischen dem Ökosystem von MathWorks und dem Ökosystem von NXP zu dienen.“
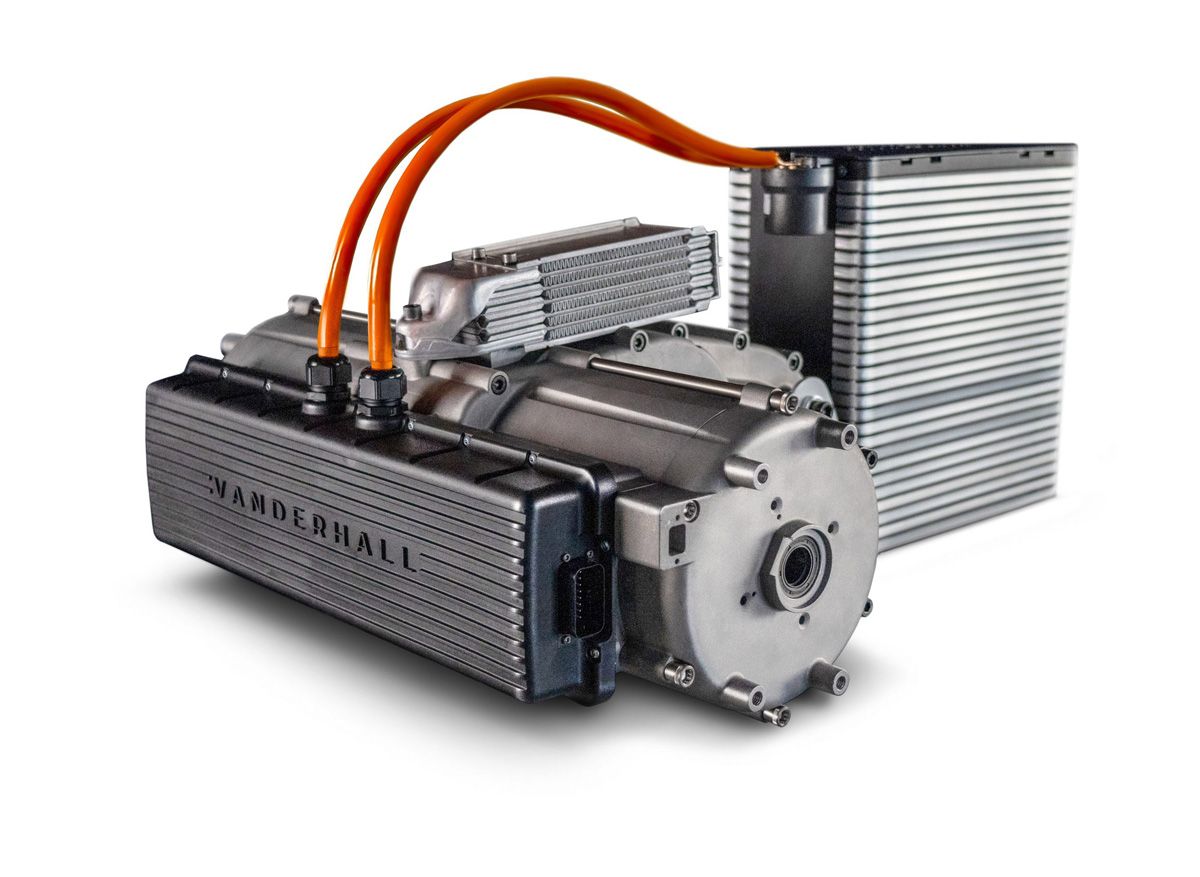
Der Motor des elektrischen Antriebs des Vanderhall Brawley. (Bildquelle: Vanderhall Motor Works)
Weitere Berichte lesen
KI/ROBOTIK
Mit dem autonomen E-Traktor kommt künstliche Intelligenz auf den Acker
Auf einem kalifornischen Weingut ist der Fahrer eines intelligenten Fahrzeugs optional
UMWELTFREUNDLICHE TECHNOLOGIEN
Kabellos: Die neue Art, Elektrofahrzeuge aufzuladen
McLarens schnellstes Straßenfahrzeug aller Zeiten wird kabellos aufgeladen
START-UPS/UMWELTFREUNDLICHE TECHNOLOGIEN
Intelligente, umweltfreundliche Technologie sorgt für eine Verkehrswende in Indien
Elektroroller reduziert CO2-Emissionen und behebt Reichweitenängste
Website auswählen
Wählen Sie eine Website aus, um übersetzte Inhalte (sofern verfügbar) sowie lokale Veranstaltungen und Angebote anzuzeigen. Auf der Grundlage Ihres Standorts empfehlen wir Ihnen die folgende Auswahl: United States.
Sie können auch eine Website aus der folgenden Liste auswählen:
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)