AUV Deep Dive
While modeling any kind of autonomous system such as an autonomous underwater vehicle (AUV), you may encounter a few challenges such as:
- Managing requirements and validating design
- Turning a CAD model into a dynamic simulation
- Performing optimization on a model
- Deploying algorithms to ROS/ROS2
- Modeling communication methods such as acoustics
- Connecting a physical model to a photorealistic simulation
- Creating a photorealistic simulation with real-world data
In this video series, we will demonstrate how MATLAB® and Simulink® can help you solve those challenges with ease.
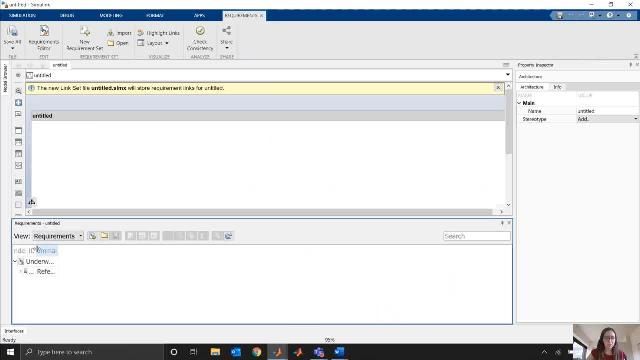
Import Requirements from Microsoft Word into Simulink
Many projects start with a requirements document. This video shows how to import this document and implement digital threads in your Simulink model.

Import a CAD Model of an AUV for Dynamic Simulation
Given a CAD model of a mechanism, such as an underwater vehicle, Simscape Multibody can help you easily convert it into a plant model and dynamic simulation.
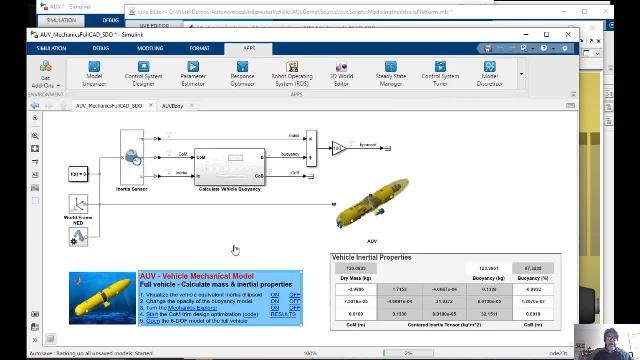
Optimize an AUV’s Center of Mass
Once you have your mechanism imported into Simulink, you can run many kinds of optimizations on properties such as the vehicle's center of mass.
Connect and Deploy to a ROS/ROS2 Network from Simulink
See how you can connect your MATLAB scripts and Simulink models to an existing ROS/ROS2 network.

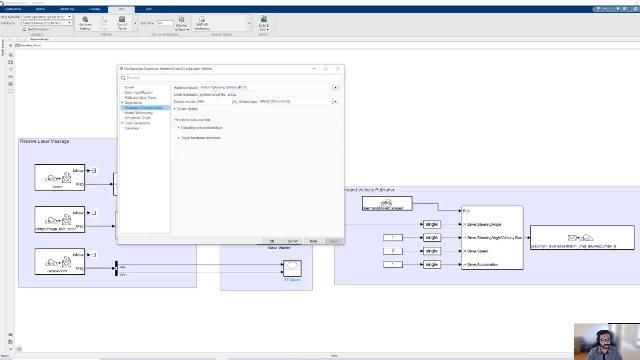
Design and Analyze Acoustic Communication Channel Propagation and Modulation Schemes
Learn how to model the acoustic communication between a buoy and an underwater vehicle and estimate the communication range and data loss in a particular scenario.

Connect a Physical Model in Simulink to Unreal Engine
Learn how to connect your physical model and controllers in Simulink to a photorealistic simulation in Unreal Engine and read back sensor data.

Automatically Create an Unreal Scene Using Real-World Bathymetry Data
See how to build an Unreal scene from real-world data, and how RoadRunner can make this process easy.