Equivalent Consumption Minimization Strategy
Energy management controller for P0–P4 hybrid electric vehicles
Libraries:
Powertrain Blockset /
Propulsion /
Supervisory Controllers
Description
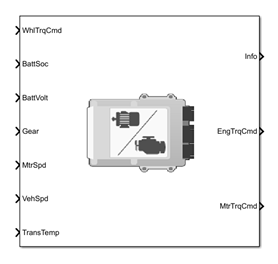
Use the Equivalent Consumption Minimization Strategy (ECMS) block to control the energy management of hybrid electric vehicles (HEVs). The block optimizes the torque split between the engine and motor to minimize energy consumption while maintaining the battery state of charge (SOC).
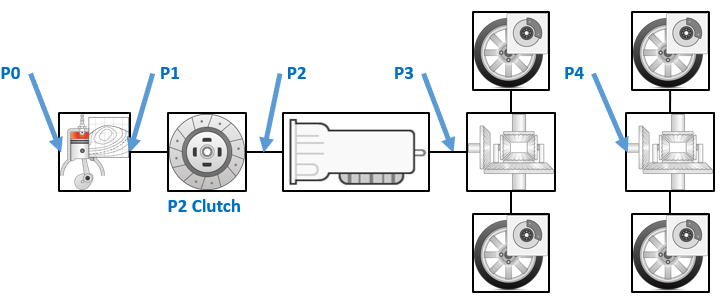
The HEV P0, P1, P2, P3, and P4 reference applications use the Equivalent Consumption Minimization Strategy block for hybrid control.
Use the Motor location parameter to specify the HEV motor location.
Use the ECMS method parameter to implement either an adaptive or non-adaptive ECMS method. The HEV architectures are charge-sustaining, meaning the battery SOC must remain in a specified range because there is no plugin capability to recharge the battery. The battery is an energy buffer, and all energy comes from the fuel if the change in SOC is minimized over a drive cycle. To sustain the charge over a specified drive cycle, the block implements either of these ECMS methods.
| ECMS Method | Description |
|---|---|
| The block uses a constant ECMS equivalence factor.
|
| The block adjusts an ECMS equivalence factor by using the output of a PI controller.
|
ECMS Control Algorithm
The block implements a dynamic supervisory controller that determines the engine torque, motor torque, starter, clutch, and brake pressure commands. Specifically, the block:
Converts the driver accelerator pedal signal to a wheel torque request. To calculate the total powertrain torque at the wheels, the algorithm uses the maximum engine torque and motor torque curves and the transmission and differential gear ratios.
Converts the driver brake pedal signal to a brake pressure request. The algorithm multiplies the brake pedal signal by a maximum brake pressure.
Implements a regenerative braking algorithm for the traction motor to recover the maximum amount of kinetic energy from the vehicle.
The block implements an ECMS algorithm[2] that optimizes the torque split between the engine and motor to minimize energy consumption while maintaining the battery SOC. Specifically, the ECMS:
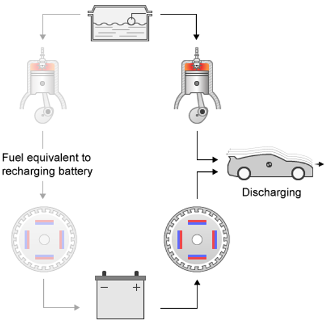
Assigns a cost to electrical energy, so that using stored electrical energy is equal to consuming fuel energy.
Battery Mode Equivalent Electrical Energy Description Discharging
Positive
Battery discharges stored electrical energy when the electric machine is in use.
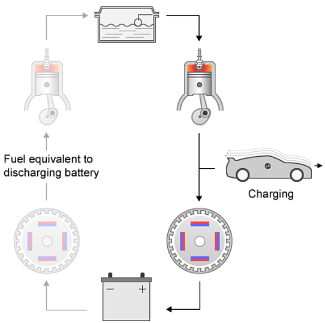
Charging
Negative
Battery stores electrical energy from either the:
Engine and electric machine acting as a generator
Electric machine acting as a generator during regenerative braking
Is an instantaneous minimization method that the software solves at every controller time step. To implement the strategy, the ECMS selects the optimal motor and engine torque in the optimization strategy to minimize the equivalent energy consumption.
Implements either an adaptive or non-adaptive ECMS method.
Examples

Build Hybrid Electric Vehicle P0 Model
Build a vehicle using the hybrid electric vehicle (HEV) P0 reference application.

Calibrate ECMS Block for Objective Hybrid Vehicle Fuel Economy Assessment
Calibrate the Equivalent Consumption Minimization Strategy block in the HEV P2 reference application.
Ports
Input
Output
Parameters
Block Options
Use the ECMS method parameter to implement either an adaptive or non-adaptive ECMS method. The HEV architectures are charge-sustaining, meaning the battery SOC must remain in a specified range because there is no plugin capability to recharge the battery. The battery is an energy buffer, and all energy comes from the fuel if the change in SOC is minimized over a drive cycle. To sustain the charge over a specified drive cycle, the block implements either of these ECMS methods.
| ECMS Method | Description |
|---|---|
| The block uses a constant ECMS equivalence factor.
|
| The block adjusts an ECMS equivalence factor by using the output of a PI controller.
|
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | EcmsMethod |
| Values: | Non-adaptive (default) | Adaptive |
| Data Types: | character vector |
Differential
Transmission
Transmission efficiency factors.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | TransEffFactors |
| Values: | Gear, input torque, input speed, and
temperature (default) | Gear only |
| Data Types: | character vector |
Transmission gear number vector. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | G_trans |
| Values: | [0 1 2 3 4 5 6] (default) | vector |
| Data Types: | double |
Transmission gear ratio vector. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | N_trans |
| Values: | [1 4.212 2.637 1.8 1.386 1 0.772] (default) | vector |
| Data Types: | double |
Transmission efficiency vector. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | eta_trans |
| Values: | [1 1 1 1 1 1 1] (default) | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Transmission efficiency factors
to Gear only.
Transmission efficiency torque breakpoints, in N·m.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Trq_trans_bpts |
| Values: | [25 50 75 100 150 200 250] (default) | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Transmission efficiency factors to
Gear, input torque, input speed, and temperature.
Transmission efficiency speed breakpoints, in rad/s.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | omega_trans_bpts |
| Values: | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Transmission efficiency factors to
Gear, input torque, input speed, and temperature.
Transmission efficiency temperature breakpoints, in K.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Temp_trans_bpts |
| Values: | [313 358] (default) | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Transmission efficiency factors to
Gear, input torque, input speed, and temperature.
Transmission efficiency vector. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | eta_trans_tbl |
| Values: | array |
| Data Types: | double |
Dependencies
To enable this parameter, set Transmission efficiency factors to
Gear, input torque, input speed, and temperature.
Engine
Battery
Battery state-of-charge breakpoints. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | SOC_bpt |
| Values: | [0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1] (default) | vector |
| Data Types: | double |
Battery charge limit table. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | ChrgLmt |
| Values: | [1 1 1 1 1 1 1 0.9 0.7 0.5 0] (default) | vector |
| Data Types: | double |
Battery discharge limit table. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | DischrgLmt |
| Values: | [0 0.5 0.7 0.9 1 1 1 1 1 1 1] (default) | vector |
| Data Types: | double |
Motor
P0 belt ratio. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | N_P0 |
| Values: | 3 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Motor location to
P0.
Energy Management
Adaptive ECMS proportional gain. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | ECMS_Kp |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set ECMS method to
Adaptive.
Adaptive ECMS integral gain. No dimension.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | ECMS_Ki |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set ECMS method to
Adaptive.
Acknowledgments
MathWorks® would like to acknowledge the contribution of Dr. Simona Onori to the ECMS optimal control algorithm implemented in this block. Dr. Onori is a Professor of Energy Resources Engineering at Stanford University. Her research interests include electrochemical modeling, estimation and optimization of energy storage devices for automotive and grid-level applications, hybrid and electric vehicles modeling and control, PDE modeling, and model-order reduction and estimation of emission mitigation systems. She is a senior member of IEEE®.
References
[1] Balazs, A., Morra, E., and Pischinger, S., Optimization of Electrified Powertrains for City Cars. SAE Technical Paper 2011-01-2451. Warrendale, PA: SAE International Journal of Alternative Powertrains, 2012.
[2] Onori, S., Serrao, L., and Rizzoni, G., Hybrid Electric Vehicles Energy Management Systems. New York: Springer, 2016.