firls
Least-square linear-phase FIR filter design
Description
Examples
The following illustrates how to design a lowpass filter of order 225 with transition band.
Create the frequency and amplitude vectors, f and a.
f = [0 0.25 0.3 1]
f = 1×4
0 0.2500 0.3000 1.0000
a = [1 1 0 0]
a = 1×4
1 1 0 0
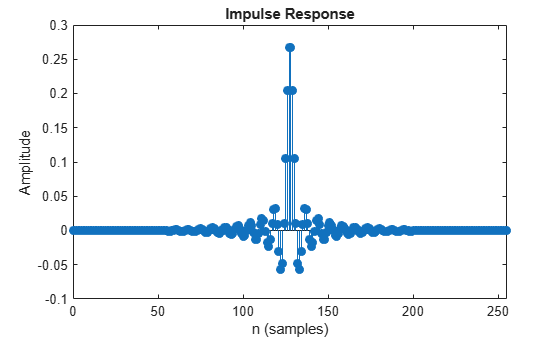
Use the firls function to obtain the n+1 coefficients of the order n lowpass FIR filter.
b = firls(255,f,a);
Show the impulse response of the filter
impz(b)
The following shows how to design a 24th-order anti-symmetric filter with piecewise linear passbands, and plot the desired and actual amplitude responses.
Create the frequency and amplitude vectors, f and a.
f = [0 0.3 0.4 0.6 0.7 0.9]; a = [0 1 0 0 0.5 0.5];
Use firls to obtain the 25 coefficients of the filter.
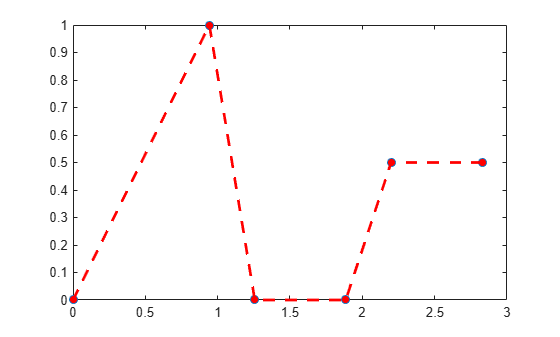
b = firls(24,f,a,'hilbert');Plot the ideal amplitude response along with the transition regions.
plot(f.*pi,a,'o','markerfacecolor',[1 0 0]); hold on; plot(f.*pi,a,'r--','linewidth',2);
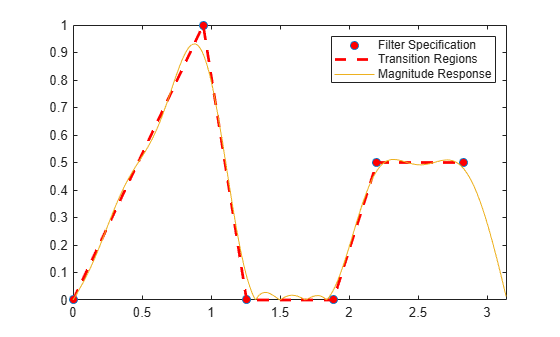
Use freqz to obtain the frequency response of the designed filter and plot the magnitude response of the filter.
[H,F] = freqz(b,1); plot(F,abs(H)); set(gca,'xlim',[0 pi]) legend('Filter Specification','Transition Regions','Magnitude Response')
Input Arguments
Output Arguments
More About
Algorithms
firls designs a linear-phase FIR filter.
This filter minimizes the weighted, integrated squared error between
an ideal piecewise linear function and the magnitude response of the
filter over a set of desired frequency bands.
Reference [1] describes the theoretical
approach behind firls. The function solves a system
of linear equations involving an inner product matrix of size roughly n/2 using
the MATLAB® \ operator.
This function designs type I, II, III, and IV linear-phase filters.
Type I and II are the defaults for n even and odd respectively. The 'hilbert' and 'differentiator' flags
produce type III (n even) and IV (n odd) filters. The various filter
types have different symmetries and constraints on their frequency
responses (see [2] for
details).
| Linear Phase Filter Type | Filter Order | Symmetry of Coefficients | Response H(f), f = 0 | Response H(f), f = 1 (Nyquist) |
|---|---|---|---|---|
Type I | Even | b(k) = b(n+2-k), k=1,..., n+1 | No restriction | No restriction |
Type II | Odd | b(k) = b(n+2-k), k=1,..., n+1 | No restriction | H(1) = 0 |
Type III | Even | b(k) = –b(n+2-k), k=1,..., n+1 | H(0) = 0 | H(1) = 0 |
Type IV | Odd | b(k) = –b(n+2-k), k=1,..., n+1 | H(0) = 0 | No restriction |
References
[1] Parks, T.W., and C.S. Burrus, Digital Filter Design, John Wiley & Sons, 1987, pp. 54-83.
[2] Oppenheim, A.V., and R.W. Schafer, Discrete-Time Signal Processing, Prentice-Hall, 1989, pp. 256-266.
Version History
Introduced in R2011a
See Also
fir1 | fir2 | rcosdesign | firpm