tune
Tune ahrs10filter parameters to reduce estimation
error
Syntax
Description
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)ahrs10filter filter object, filter, and measurement
noises to reduce the root-mean-squared (RMS) state estimation error between the fused sensor
data and the ground truth. The function also returns the tuned measurement noise,
tunedMeasureNoise. The function uses the property values in the
filter and the measurement noise provided in the measureNoise structure
as the initial estimate for the optimization algorithm.
tunedMeasureNoise = tune(___,config)tunerconfig object, config.
Examples
Load the recorded sensor data and ground truth data.
load('ahrs10filterTuneData.mat');Create tables for the sensor data and the truth data.
sensorData = table(Accelerometer,Gyroscope,...
Magnetometer,Altimeter);
groundTruth = table(Orientation, Altitude);Create an ahrs10filter filter object.
filter = ahrs10filter('State', initialState, ... 'StateCovariance', initialStateCovariance);
Create a tuner configuration object for the filter. Set the maximum iterations to ten and set the objective limit to 0.001.
cfg = tunerconfig('ahrs10filter','MaxIterations',10,... 'ObjectiveLimit',1e-3);
Use the tuner noise function to obtain a set of initial sensor noises used in the filter.
measNoise = tunernoise('ahrs10filter')measNoise = struct with fields:
MagnetometerNoise: 1
AltimeterNoise: 1
Tune the filter and obtain the tuned parameters.
tunedNoise = tune(filter, measNoise, sensorData, ...
groundTruth, cfg); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0526
1 GyroscopeNoise 0.0526
1 MagnetometerNoise 0.0523
1 AltimeterNoise 0.0515
1 AccelerometerBiasNoise 0.0510
1 GyroscopeBiasNoise 0.0510
1 GeomagneticVectorNoise 0.0510
1 MagnetometerBiasNoise 0.0508
2 AccelerometerNoise 0.0508
2 GyroscopeNoise 0.0508
2 MagnetometerNoise 0.0504
2 AltimeterNoise 0.0494
2 AccelerometerBiasNoise 0.0490
2 GyroscopeBiasNoise 0.0490
2 GeomagneticVectorNoise 0.0490
2 MagnetometerBiasNoise 0.0487
3 AccelerometerNoise 0.0487
3 GyroscopeNoise 0.0487
3 MagnetometerNoise 0.0482
3 AltimeterNoise 0.0472
3 AccelerometerBiasNoise 0.0467
3 GyroscopeBiasNoise 0.0467
3 GeomagneticVectorNoise 0.0467
3 MagnetometerBiasNoise 0.0463
4 AccelerometerNoise 0.0463
4 GyroscopeNoise 0.0463
4 MagnetometerNoise 0.0456
4 AltimeterNoise 0.0446
4 AccelerometerBiasNoise 0.0442
4 GyroscopeBiasNoise 0.0442
4 GeomagneticVectorNoise 0.0442
4 MagnetometerBiasNoise 0.0437
5 AccelerometerNoise 0.0437
5 GyroscopeNoise 0.0437
5 MagnetometerNoise 0.0428
5 AltimeterNoise 0.0417
5 AccelerometerBiasNoise 0.0413
5 GyroscopeBiasNoise 0.0413
5 GeomagneticVectorNoise 0.0413
5 MagnetometerBiasNoise 0.0408
6 AccelerometerNoise 0.0408
6 GyroscopeNoise 0.0408
6 MagnetometerNoise 0.0397
6 AltimeterNoise 0.0385
6 AccelerometerBiasNoise 0.0381
6 GyroscopeBiasNoise 0.0381
6 GeomagneticVectorNoise 0.0381
6 MagnetometerBiasNoise 0.0375
7 AccelerometerNoise 0.0375
7 GyroscopeNoise 0.0375
7 MagnetometerNoise 0.0363
7 AltimeterNoise 0.0351
7 AccelerometerBiasNoise 0.0347
7 GyroscopeBiasNoise 0.0347
7 GeomagneticVectorNoise 0.0347
7 MagnetometerBiasNoise 0.0342
8 AccelerometerNoise 0.0342
8 GyroscopeNoise 0.0342
8 MagnetometerNoise 0.0331
8 AltimeterNoise 0.0319
8 AccelerometerBiasNoise 0.0316
8 GyroscopeBiasNoise 0.0316
8 GeomagneticVectorNoise 0.0316
8 MagnetometerBiasNoise 0.0313
9 AccelerometerNoise 0.0313
9 GyroscopeNoise 0.0313
9 MagnetometerNoise 0.0313
9 AltimeterNoise 0.0301
9 AccelerometerBiasNoise 0.0298
9 GyroscopeBiasNoise 0.0298
9 GeomagneticVectorNoise 0.0298
9 MagnetometerBiasNoise 0.0296
10 AccelerometerNoise 0.0296
10 GyroscopeNoise 0.0296
10 MagnetometerNoise 0.0296
10 AltimeterNoise 0.0285
10 AccelerometerBiasNoise 0.0283
10 GyroscopeBiasNoise 0.0283
10 GeomagneticVectorNoise 0.0283
10 MagnetometerBiasNoise 0.0282
Fuse the sensor data using the tuned filter.
N = size(sensorData,1); qEstTuned = quaternion.zeros(N,1); altEstTuned = zeros(N,1); for ii=1:N predict(filter,Accelerometer(ii,:),Gyroscope(ii,:)); if all(~isnan(Magnetometer(ii,1))) fusemag(filter, Magnetometer(ii,:),tunedNoise.MagnetometerNoise); end if ~isnan(Altimeter(ii)) fusealtimeter(filter, Altimeter(ii),tunedNoise.AltimeterNoise); end [altEstTuned(ii), qEstTuned(ii)] = pose(filter); end
Compute the RMS errors.
orientationErrorTuned = rad2deg(dist(qEstTuned, Orientation)); rmsOrientationErrorTuned = sqrt(mean(orientationErrorTuned.^2))
rmsOrientationErrorTuned = 2.2899
positionErrorTuned = altEstTuned - Altitude; rmsPositionErrorTuned = sqrt(mean( positionErrorTuned.^2))
rmsPositionErrorTuned = 0.0199
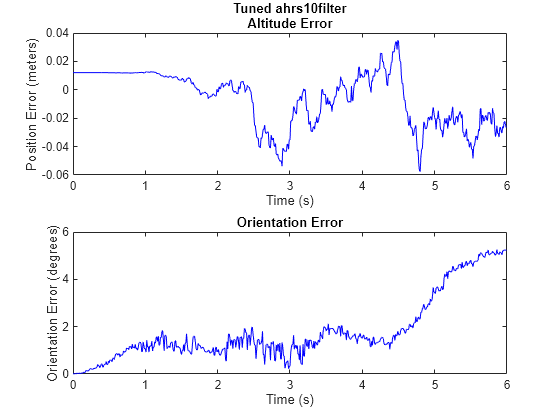
Visualize the results.
figure; t = (0:N-1)./ filter.IMUSampleRate; subplot(2,1,1) plot(t, positionErrorTuned, 'b'); title("Tuned ahrs10filter" + newline + ... "Altitude Error") xlabel('Time (s)'); ylabel('Position Error (meters)') subplot(2,1,2) plot(t, orientationErrorTuned, 'b'); title("Orientation Error") xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Input Arguments
Output Arguments
References
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Version History
Introduced in R2021a