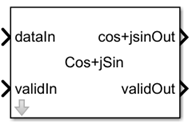
Cos+jSin
Compute Cos+jSin operation using CORDIC approximation method and
simulate with latency
Libraries:
HDL Coder
Description
The Cos+jSin block computes the complex exponential of the input signal by using the coordinate rotation digital computer (CORDIC) approximation method. For more information, see CORDIC approximation method in Algorithms. The block has control signals that indicate whether the input and output data are valid. You can also specify the number of iterations of the algorithm and the latency strategy.
To use this block in your Simulink® model, open the HDLMathLib library by entering this command
in the MATLAB® Command
Window:
open_system('HDLMathLib')Examples
Implement Sine and Cosine Block with Control Signals
Implement the control-signal based SinCos block and use it generate HDL code.
Ports
Input
Output
Parameters
Algorithms
References
[1] Volder, Jack E., “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8 (1959); 330–334.
[2] Andraka, Ray “A Survey of CORDIC Algorithm for FPGA Based Computers.” Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays. Feb. 22–24 (1998): 191–200.
[3] Walther, J.S., “A Unified Algorithm for Elementary Functions,” Proceedings of the Spring Joint Computer Conference, May 18-20, 1971: 379–386.
[4] Schelin, Charles W., “Calculator Function Approximation,” The American Mathematical Monthly 90, no. 5 (1983): 317–325.