colorangle
Angle between two RGB vectors
Description
Examples
Read a test image. The image is the raw data captured with a Canon EOS 30D digital camera after correcting the black level and scaling the intensities to 16 bits per pixel. No demosaicing, white balancing, color enhancement, noise filtering, or gamma correction has been applied.
RAW = imread("foosballraw.tiff");Interpolate using the demosaic function to obtain a color image. The color filter array pattern is RGGB.
A = demosaic(RAW,"rggb");Display the image. Because the image is in linear RGB color space, apply gamma correction so the image appears correctly on the screen.
A_sRGB = lin2rgb(A); imshow(A_sRGB)
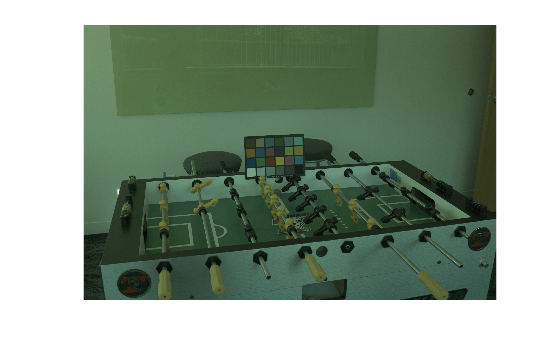
The image contains a ColorChecker® chart. Specify the ground truth illuminant, which was calculated in advance using the neutral patches of the chart.
illuminant_groundtruth = [0.0717 0.1472 0.0975];
To avoid skewing the estimation of the illuminant, exclude the ColorChecker chart by creating a mask.
mask = true(size(A,1), size(A,2)); mask(920:1330,1360:1900) = false;
Run three different illuminant estimation algorithms: illumwhite, illumgray, and illumpca.
illuminant_whitepatch = illumwhite(A,"Mask",mask); illuminant_grayworld = illumgray(A,"Mask",mask); illuminant_pca = illumpca(A,"Mask",mask);
Compare each estimation against the ground truth by calculating the angle between each estimated illuminant and the ground truth using the colorangle function. The smaller the angle, the better the estimation. The magnitude of the estimation does not matter because only the direction of the illuminant is used to white-balance an image with chromatic adaptation.
angle_whitepatch = colorangle(illuminant_whitepatch,illuminant_groundtruth)
angle_whitepatch = 5.0921
angle_grayworld = colorangle(illuminant_grayworld,illuminant_groundtruth)
angle_grayworld = 5.1036
angle_pca = colorangle(illuminant_pca,illuminant_groundtruth)
angle_pca = 5.0134
The value of angle_pca is smallest, indicating that the PCA illuminant estimation algorithm is closest to the ground truth illumination for this image.
Input Arguments
Output Arguments
More About
Version History
Introduced in R2017b
See Also
whitepoint | chromadapt | illumgray | illumpca | illumwhite