rotate
Rotate polyshape
Description
Examples
Create a square, polyin, and rotate it 45 degrees counterclockwise with respect to the point (0,0).
polyin = polyshape([0 0 1 1],[1 0 0 1]); poly1 = rotate(polyin,45);
Rotate polyin 45 degrees with respect to the point (1,0).
poly2 = rotate(polyin,45,[1 0]);
Plot all three polygons.
plot([polyin poly1 poly2])
axis equal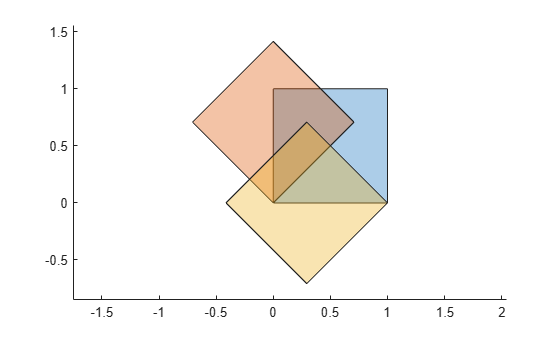
Input Arguments
Extended Capabilities
Version History
Introduced in R2017b