mpcmoveopt
Option set for mpcmove function
Description
To specify options for the mpcmove, mpcmoveAdaptive, and mpcmoveMultiple functions, use an mpcmoveopt
object.
Using this object, you can specify run-time values for a subset of controller properties,
such as tuning weights and constraints. If you do not specify a value for one of the
mpcmoveopt properties, the value of the corresponding controller option
is used instead.
Creation
Syntax
Description
options = mpcmoveoptmpcmove function. To modify the property values,
use dot notation.
Properties
Object Functions
mpcmove | Compute optimal control action and update controller states |
mpcmoveAdaptive | Compute optimal control with prediction model updating |
mpcmoveMultiple | Compute gain-scheduling MPC control action at a single time instant |
Examples
Vary a manipulated variable upper bound during a simulation.
Define the plant, which includes a 4-second input delay. Convert to a delay-free, discrete, state-space model using a 2-second control interval. Create the corresponding default controller, and specify MV bounds at +/-2.
Ts = 2; Plant = absorbDelay(c2d(ss(tf(0.8,[5 1],InputDelay=4)),Ts)); mpcobj = mpc(Plant,Ts);
-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
mpcobj.MV(1).Min = -2; mpcobj.MV(1).Max = 2;
Create an empty mpcmoveopt object. During simulation, you can set properties of the object to specify controller parameters.
options = mpcmoveopt;
Pre-allocate storage and initialize the controller state.
v = []; t = [0:Ts:20]; N = length(t); y = zeros(N,1); u = zeros(N,1); x = mpcstate(mpcobj);
-->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
Use mpcmove to simulate the following:
Reference (setpoint) step change from initial condition r = 0 to r = 1 (servo response)
MV upper bound step decrease from 2 to 1, occurring at t = 10
r = 1; for i = 1:N y(i) = Plant.C*x.Plant; if t(i) >= 10 options.MVMax = 1; end [u(i),Info] = mpcmove(mpcobj,x,y(i),r,v,options); end
As the loop executes, the value of options.MVMax is reset to 1 for all iterations that occur after t = 10. Prior to that iteration, options.MVMax is empty. Therefore, the controller's value for MVMax is used, mpcobj.MV(1).Max = 2.
Plot the results of the simulation.
[Ts,us] = stairs(t,u); plot(Ts,us,'b-',t,y,'r-') legend('MV','OV') xlabel(sprintf('Time, %s',Plant.TimeUnit))
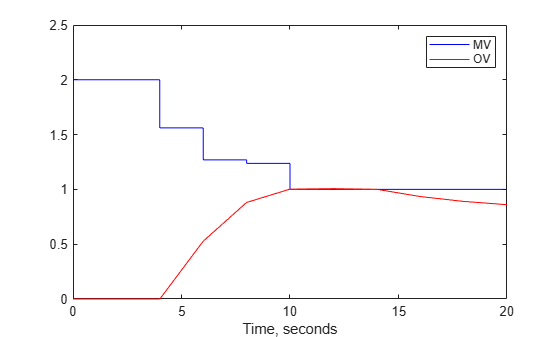
From the plot, you can observe that the original MV upper bound is active until t = 4. After the input delay of 4 seconds, the output variable (OV) moves smoothly to its new target of r = 1, reaching the target at t = 10. The new MV bound imposed at t = 10 becomes active immediately. This forces the OV below its target, after the input delay elapses.
Now assume that you want to impose an OV upper bound at a specified location relative to the OV target. Consider the following constraint design command:
mpcobj.OV(1).Max = [Inf,Inf,0.4,0.3,0.2];
This is a horizon-varying constraint. The known input delay makes it impossible for the controller to satisfy an OV constraint prior to the third prediction-horizon step. Therefore, a finite constraint during the first two steps would be poor practice. For illustrative purposes, the previous constraint also decreases from 0.4 at step 3 to 0.2 at step 5 and thereafter.
The following commands produce the same results shown in the previous plot. The OV constraint is never active because it is being varied in concert with the setpoint, r.
x = mpcstate(mpcobj);
-->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
OPTobj = mpcmoveopt; for i = 1:N y(i) = Plant.C*x.Plant; if t(i) >= 10 OPTobj.MVMax = 1; end OPTobj.OutputMax = r + 0.4; [u(i),Info] = mpcmove(mpcobj,x,y(i),r,v,OPTobj); end
The scalar value r + 0.4 replaces the first finite value in the mpcobj.OV(1).Max vector, and the remaining finite values adjust to maintain the original profile, that is, the numerical difference between these values is unchanged. r = 1 for the simulation, so the previous use of the mpcmoveopt object is equivalent to the command
mpcobj.OV(1).Max = [Inf, Inf, 1.4, 1.3, 1.2];
However, using the mpcmoveopt object involves much less computational overhead.
Tips
If a variable is unconstrained in the initial controller design, you cannot constrain it using
mpcmoveopt. The controller ignores any such specifications.You cannot remove a constraint from a variable that is constrained in the initial controller design. However, you can change it to a large (or small) value such that it is unlikely to become active.
Version History
Introduced in R2018b