delayseq
Delay or advance sequence
Description
shifted_data = delayseq(data,delay)data by the number of samples
specified in delay. Positive values of delay delay
the signal, while negative values advance the signal. Noninteger values of
delay represent fractional delays or advances. For fractional delays,
the function interpolates between samples.
How the delayseq function operates on data
depends on the dimensions of the data and delay
arguments:
When
delayis a scalar, the function applies the same delay to each column ofdata.When
delayis a vector:If
datais a matrix, the length of thedelayvector must equal the number of columns in the matrix. The function applies a delay to each column using the correspondingdelayentry.If
datais a column vector, the function creates a matrix where each column is the shift in thedatavector by each entry indelay. The number of columns inshifted_dataequals the length of thedelayvector. The kth column ofshifted_datais the result of shiftingdatabydelay(k).
shifted_data = delayseq(data,delay,fs)delay in seconds. fs is the sampling
frequency of data. If the product of delay and
fs is not an integer, delayseq implements a
fractional delay or advance of the signal using interpolation.
Examples
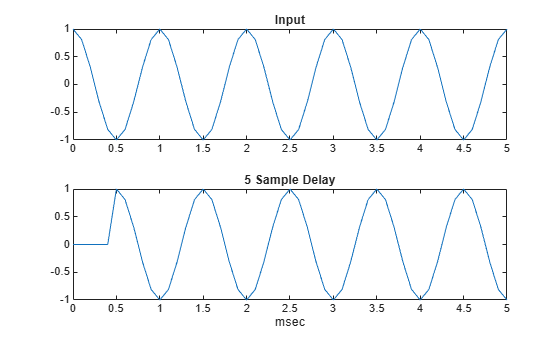
Delay a 1 kHz cosine signal by an integer number of samples. Assume a sampling rate of 10 kHz.
fs = 1.0e4; t = 0:1/fs:0.005; signal = cos(2*pi*1000*t)';
Set the delay to 5 samples (0.5 ms).
shifted_signal = delayseq(signal,5);
Plot the original and delayed signals.
subplot(2,1,1) plot(t.*1000,signal) title('Input') subplot(2,1,2) plot(t.*1000,shifted_signal) title('5 Sample Delay') xlabel('msec')
Delay a 1 kHz cosine signal by a fractional number of samples. Assume a sampling rate of 10 kHz.
fs = 1e4; t = 0:1/fs:0.005; signal = cos(2*pi*1000*t)';
Set the delay to 0.25 ms or 2.5 samples.
delayed_signal = delayseq(signal,0.25e-3,fs);
Plot the original and delayed signals.
plot(t.*1000,signal) title('Delayed Signal') hold on plot(t.*1000,delayed_signal,'r') axis([0 5 -1.1 1.1]) xlabel('msec') legend('Original Signal','Delayed Signal') hold off
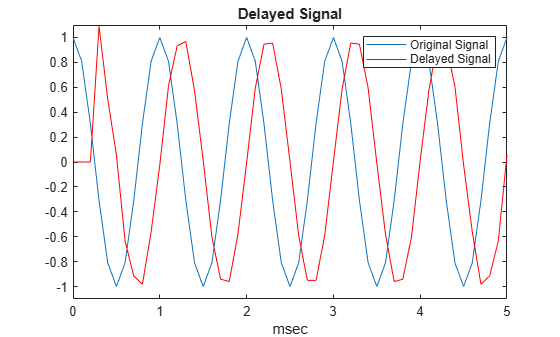
The delayed signal values differ from the original signal values because interpolation is used to implement the fractional delay.
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2011a