importrobot
Import rigid body tree model from URDF, Xacro, SDF file, text, or Simscape Multibody model
Syntax
Description
This function imports a robot model from a URDF file, Xacro file, SDF file,
robot description text, or a Simscape™
Multibody™ model as a rigidBodyTree object.
To import robot models from files that use STEP or SLDPRT files for visuals or collisions, install the Robotics System Toolbox™ Offroad Autonomy Library support package from the Add-On Explorer.
Note
To load predefined, ready-to-use, robot models from the Robotics System Toolbox Robot Library, use the loadrobot function.
URDF, Xacro, or SDF Import
robot = importrobot(filename)rigidBodyTree object by parsing
the Unified Robot Description Format (URDF), XML Macros (Xacro), or Simulation
Description Format (SDF) file specified by filename.
robot = importrobot(___,Name=Value)importrobot("iiwa14.urdf",CollisionDecomposition=true)
imports a KUKA LBR iiwa 14 robot and decomposes the collision meshes of the
robot using voxelized hierarchical approximate convex decomposition
(V-HACD).
Use the URDF, Xacro, or SDF Import name-value argument to import a model from URDF, Xacro, or SDF file, or text.
Simscape Multibody Model Import
[
imports a Simscape
Multibody model and returns an equivalent robot,importInfo] = importrobot(model)rigidBodyTree object and
information about the import in importInfo. Only fixed,
prismatic, revolute joints, and floating joints are supported in the output
rigidBodyTree object.
It also imports supported visual information along with the rigid body tree
representation when importing a Simscape
Multibody model. This includes DAE, STL meshes, ensuring compatibility with
supported rigid body visuals. Additionally, it imports various frames associated
with the Simscape
Multibody model and makes it a part of the imported
rigidBodyTree
robot.
Note
If you install the Robotics System Toolbox Offroad Autonomy Library from the Add-On Installer,
importrobot can additionally import visuals and
collisions from Simscape
Multibody models that use STEP and SLDPRT meshes.
[
specifies options using one or more name-value pair arguments in addition to the
Simscape
Multibody model from the previous syntax. Use the Simscape Multibody Model Import name-value arguments
to import a model that uses other joint types, constraint blocks, or variable
inertias.robot,importInfo] = importrobot(___,Name,Value)
Examples
Import a URDF file as a rigidBodyTree object.
robot = importrobot('iiwa14.urdf')robot =
rigidBodyTree with properties:
NumBodies: 10
Bodies: {[1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody]}
Base: [1×1 rigidBody]
BodyNames: {'iiwa_link_0' 'iiwa_link_1' 'iiwa_link_2' 'iiwa_link_3' 'iiwa_link_4' 'iiwa_link_5' 'iiwa_link_6' 'iiwa_link_7' 'iiwa_link_ee' 'iiwa_link_ee_kuka'}
BaseName: 'world'
Gravity: [0 0 0]
DataFormat: 'struct'
FrameNames: {'world' 'iiwa_link_0' 'iiwa_link_1' 'iiwa_link_2' 'iiwa_link_3' 'iiwa_link_4' 'iiwa_link_5' 'iiwa_link_6' 'iiwa_link_7' 'iiwa_link_ee' 'iiwa_link_ee_kuka'}
show(robot)
Specify the URDF character vector. This character vector is a minimalist description for creating a valid robot model.
URDFtext = '<?xml version="1.0" ?><robot name="min"><link name="L0"/></robot>';Import the robot model. The description creates a rigidBodyTree object that has only a robot base link named 'L0'.
robot = importrobot(URDFtext)
robot =
rigidBodyTree with properties:
NumBodies: 0
Bodies: {1×0 cell}
Base: [1×1 rigidBody]
BodyNames: {1×0 cell}
BaseName: 'L0'
Gravity: [0 0 0]
DataFormat: 'struct'
FrameNames: {'L0'}
You can import robots that have .stl files associated with the Unified Robot Description format (URDF) file to describe the visual geometries of the robot. Each rigid body has an individual visual geometry specified. The importrobot function parses the URDF file to get the robot model and visual geometries. The function assumes that visual geometry and collision geometry of the robot are the same and assigns the visual geometries as collision geometries of corresponding bodies.
Use the show function to display the visual and collision geometries of the robot model in a figure. You can then interact with the model by clicking components to inspect them and right-clicking to toggle visibility.
Import a robot model as a URDF file. The .stl file locations must be properly specified in this URDF. To add other .stl files to individual rigid bodies, see addVisual.
robot = importrobot('iiwa14.urdf');Visualize the robot with the associated visual model. Click bodies or frames to inspect them. Right-click bodies to toggle visibility for each visual geometry.
show(robot,Visuals="on",Collisions="off");

Visualize the robot with the associated collision geometries. Click bodies or frames to inspect them. Right-click bodies to toggle visibility for each collision geometry.
show(robot,Visuals="off",Collisions="on");

Import an existing Simscape™ Multibody™ robot model into the Robotics System Toolbox™ as a rigidBodyTree object.
Open the Simscape Multibody model. This is a model for a humanoid robot.
open_system('example_smhumanoidrobot.slx')Import the model.
[robot,importInfo] = importrobot(gcs)
robot =
rigidBodyTree with properties:
NumBodies: 21
Bodies: {1×21 cell}
Base: [1×1 rigidBody]
BodyNames: {'Body01' 'Body02' 'Body03' 'Body04' 'Body05' 'Body06' 'Body07' 'Body08' 'Body09' 'Body10' 'Body11' 'Body12' 'Body13' 'Body14' 'Body15' 'Body16' 'Body17' 'Body18' 'Body19' 'Body20' 'Body21'}
BaseName: 'Base'
Gravity: [0 0 -9.8066]
DataFormat: 'struct'
FrameNames: {1×378 cell}
importInfo =
rigidBodyTreeImportInfo with properties:
SourceModelName: 'example_smhumanoidrobot'
RigidBodyTree: [1×1 rigidBodyTree]
BlockConversionInfo: [1×1 struct]
Display details about the created rigidBodyTree object.
showdetails(importInfo)
-------------------- Robot: (21 bodies) Idx Body Name Simulink Source Blocks Joint Name Simulink Source Blocks Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------------------- ---------- ---------------------- ---------- ---------------- ---------------- 1 Body01 Info | List | Highlight Joint01 Info | List | Highlight revolute Base(0) Body02(2) 2 Body02 Info | List | Highlight Joint02 Info | List | Highlight revolute Body01(1) Body03(3) 3 Body03 Info | List | Highlight Joint03 Info | List | Highlight revolute Body02(2) Body04(4) 4 Body04 Info | List | Highlight Joint04 Info | List | Highlight revolute Body03(3) 5 Body05 Info | List | Highlight Joint05 Info | List | Highlight revolute Base(0) Body06(6) 6 Body06 Info | List | Highlight Joint06 Info | List | Highlight revolute Body05(5) Body07(7) 7 Body07 Info | List | Highlight Joint07 Info | List | Highlight revolute Body06(6) Body08(8) 8 Body08 Info | List | Highlight Joint08 Info | List | Highlight revolute Body07(7) 9 Body09 Info | List | Highlight Joint09 Info | List | Highlight revolute Base(0) Body10(10) 10 Body10 Info | List | Highlight Joint10 Info | List | Highlight revolute Body09(9) Body11(11) 11 Body11 Info | List | Highlight Joint11 Info | List | Highlight revolute Body10(10) Body12(12) 12 Body12 Info | List | Highlight Joint12 Info | List | Highlight revolute Body11(11) 13 Body13 Info | List | Highlight Joint13 Info | List | Highlight revolute Base(0) Body14(14) 14 Body14 Info | List | Highlight Joint14 Info | List | Highlight revolute Body13(13) Body15(15) 15 Body15 Info | List | Highlight Joint15 Info | List | Highlight revolute Body14(14) Body16(16) 16 Body16 Info | List | Highlight Joint16 Info | List | Highlight revolute Body15(15) 17 Body17 Info | List | Highlight Joint17 Info | List | Highlight revolute Base(0) Body18(18) 18 Body18 Info | List | Highlight Joint18 Info | List | Highlight revolute Body17(17) Body19(19) 19 Body19 Info | List | Highlight Joint19 Info | List | Highlight fixed Body18(18) Body20(20) 20 Body20 Info | List | Highlight Joint20 Info | List | Highlight fixed Body19(19) 21 Body21 Info | List | Highlight Joint21 Info | List | Highlight fixed Base(0) --------------------
Import KUKA LBR iiwa 14 robot.
robot = importrobot("iiwa14.urdf");Display the robot with the default collision meshes.
t = tiledlayout(1,2); title(t,"KUKA iiwa 14") nexttile; show(robot,Visuals="off",Collisions="on"); title("Default Collision Meshes"); axis auto nexttile; show(robot); title("Visual Meshes"); axis auto

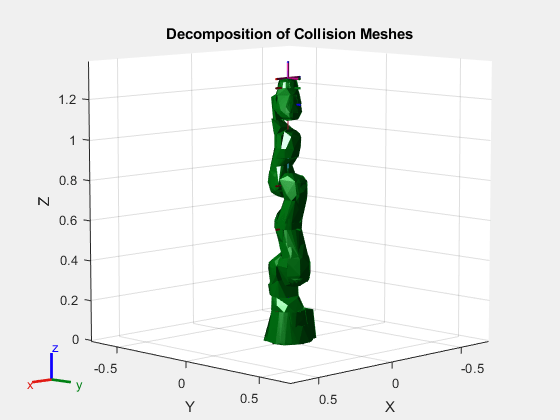
Import a robot but decompose the collision meshes using voxelized hierarchical approximate convex decomposition (V-HACD).
robotCollisionDecomp = importrobot("iiwa14.urdf",CollisionDecomposition=true);Display the robot with the updated collision meshes from decomposition.
figure show(robotCollisionDecomp,Visuals="off",Collisions="on"); title("Decomposition of Collision Meshes"); axis auto
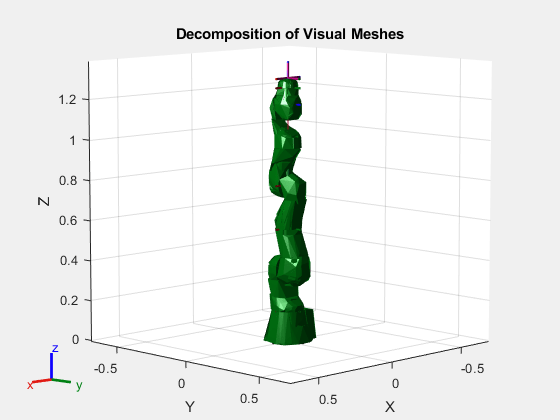
By default the V-HACD solver decomposes the collision meshes of the robot. To decompose the visual meshes of the robot, import the robot with custom V-HACD solver options.
options = vhacdOptions("RigidBodyTree",SourceMesh="VisualGeometry"); robotVisualDecomp = importrobot("iiwa14.urdf",CollisionDecomposition=options);
Display the robot with the updated collision meshes from decomposition.
figure show(robotVisualDecomp,Visuals="off",Collisions="on"); title("Decomposition of Visual Meshes"); axis auto
Input Arguments
Name-Value Arguments
Output Arguments
Limitations
importrobotdoes not support importing robot models from URDF files that contain the mimic tag.
Tips
When importing a robot model with visual meshes, the importrobot
function searches for the .stl or .dae files to
assign to each rigid body using these rules:
The function searches the raw mesh path for a specified rigid body from the URDF, Xacro, or SDF file. References to ROS packages have the
package:\\<pkg_name>removed.Absolute paths are checked directly with no modification.
Relative paths are checked using the following directories in order:
User-specified
MeshPathCurrent folder
MATLAB® path
The folder containing the URDF, Xacro, or SDF file
One level above the folder containing the URDF, Xacro, or SDF file
The file name from the mesh path in the URDF, Xacro, or SDF file is appended to the
MeshPathinput argument.
Note
If you install the Robotics System Toolbox Offroad Autonomy Library from the Add-On Installer, importrobot can
additionally import visuals and collisions from robot models that use
.step and .sldprt meshes.
If the mesh file is still not found, the parser ignores the mesh file and returns a
rigidBodyTree object without
visual.
References
[1] Mammou, Khaled, et al. “Voxelized Hierarchical Approximate Convex Decomposition - V-HACD Version 4.” GitHub, October 24, 2022. https://github.com/kmammou/v-hacd.
Extended Capabilities
Version History
Introduced in R2017aSee Also
rigidBodyTree | rigidBodyTreeImportInfo | loadrobot | vhacdOptions