loadrobot
Load predefined robot model and specifications from Robot Library
Syntax
Description
This function loads a predefined robot model and specifications from the Robot
Library as a rigidBodyTree object. Robot models in the Robot
Library include visual meshes and physical attributes. If you additionally need the source
mesh data, like DAE or STL files, for use in functions like smimport (Simscape Multibody), you must download and install the
Robotics System Toolbox Robot Library Data
support package. For more information, see Install Robotics System Toolbox Robot Library Data Support Package.
Note
To import your own robot model from a Unified Robot Description Format (URDF), XML
Macros (Xacro), or Simulation Description Format (SDF) file or Simscape™
Multibody™ model, see the importrobot function.
robotRBT = loadrobot(robotname)rigidBodyTree object specified by robot model name
robotname.
[
specifies additional options using one or more name-value arguments. For example,
robotRBT,robotData] = loadrobot(robotname,Name=Value)'Gravity',[0 0 –9.81] sets the gravity property to –9.81
m/s2 in the z-direction for the robot
model.
Examples
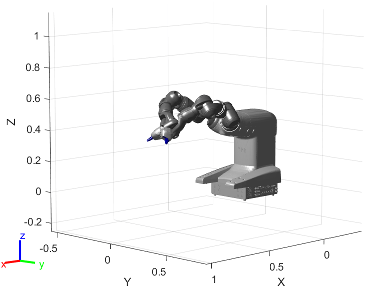
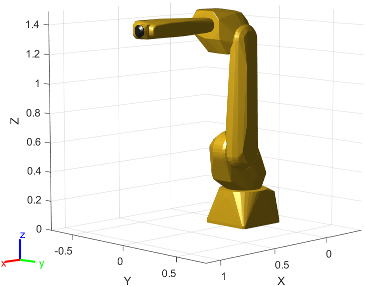
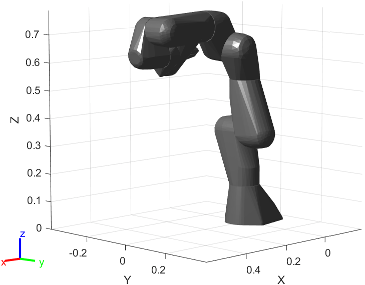
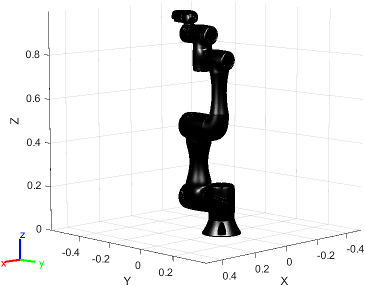
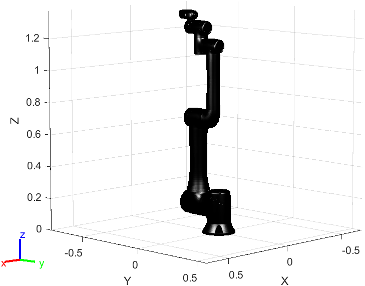
This example shows how to load an included robot model using loadrobot. Specify one of the select robot names to get a rigidBodyTree robot model that contains kinematic and dynamic constraints and visual meshes for the specified robot geometry.
gen3 = loadrobot("kinovaGen3");Show the robot model in a figure.
show(gen3);

Input Arguments
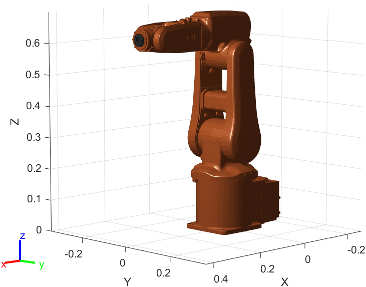
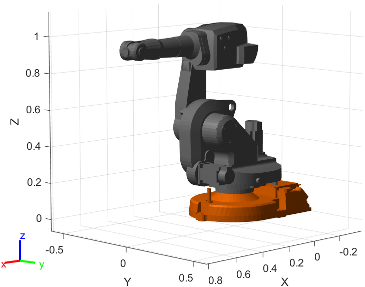
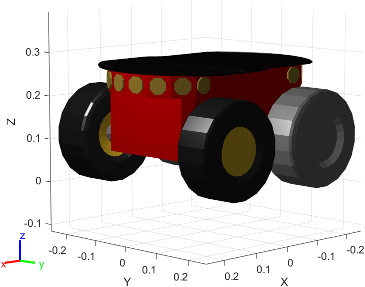
Name of robot model, specified as one of these valid robot model names:
| Robot Model | Mesh Visualization | Description |
|---|---|---|
"abbIrb120" |
| ABB IRB 120 6-axis robot |
"abbIrb120T" |
| ABB IRB 120T 6-axis robot |
"abbIrb1600" |
| ABB IRB 1600 6-axis robot |
"abbYuMi" |
| ABB YuMi 2-armed robot |
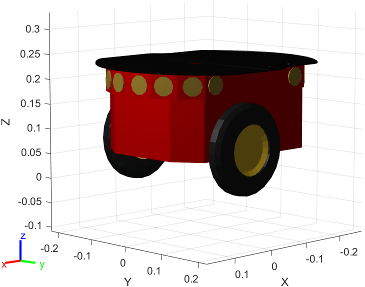
"amrPioneer3AT" |
| Adept MobileRobots Pioneer 3-AT mobile robot |
"amrPioneer3DX" |
| Adept MobileRobots Pioneer 3-DX mobile robot |
"amrPioneerLX" |
| Adept MobileRobots Pioneer LX mobile robot |
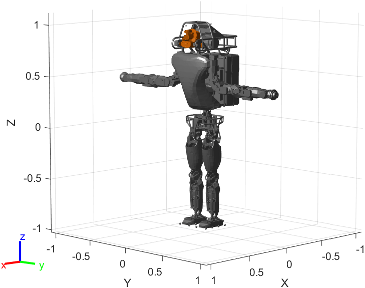
"atlas" |
| Boston Dynamics ATLAS® Humanoid robot |
"clearpathHusky" |
| Clearpath Robotics Husky mobile robot |
"clearpathJackal" |
| Clearpath Robotics Jackal mobile robot |
"clearpathTurtleBot2" |
| Clearpath Robotics TurtleBot 2 mobile robot |
"fanucLRMate200ib" |
| FANUC LR Mate 200iB 6-axis robot |
"fanucM16ib" |
| FANUC M-16iB 6-axis robot |
"frankaEmikaPanda" |
| Franka Emika Panda 7-axis robot |
"kinovaGen3" | Version 1:
Version 2:
| KINOVA® Gen3 7-axis robot |
"kinovaJacoJ2N6S200" |
| KINOVA JACO® 2-fingered 6 DOF robot with non-spherical wrist |
"kinovaJacoJ2N6S300" |
| KINOVA JACO® 3-fingered 6 DOF robot with non-spherical wrist |
"kinovaJacoJ2N7S300" |
| KINOVA JACO® 3-fingered 7 DOF robot with non-spherical wrist |
"kinovaJacoJ2S6S300" |
| KINOVA JACO® 3-fingered 6 DOF robot with spherical wrist |
"kinovaJacoJ2S7S300" |
| KINOVA JACO® 3-fingered 7 DOF robot with spherical wrist |
"kinovaJacoTwoArmExample" |
| Two KINOVA JACO® 3-fingered 6 DOF robots with non-spherical wrist |
"kinovaMicoM1N4S200" |
| KINOVA MICO® 2-fingered 4 DOF robot |
"kinovaMicoM1N6S200" |
| KINOVA MICO® 2-fingered 6 DOF robot |
"kinovaMicoM1N6S300" |
| KINOVA MICO® 3-fingered 6 DOF robot |
"kinovaMovo" |
| KINOVA MOVO® 2-armed mobile robot |
"kukaIiwa7" |
| KUKA LBR iiwa 7 R800 7-axis robot |
"kukaIiwa14" |
| KUKA LBR iiwa 14 R820 7-axis robot |
"meca500r3" |
| Mecademic Meca500 R3 6-axis robot |
"omronEcobra600" |
| Omron eCobra 600 4-axis SCARA robot |
"puma560" |
| PUMA 560 6-axis robot |
"quanserQArm" |
| Quanser QArm 4 DOF robot |
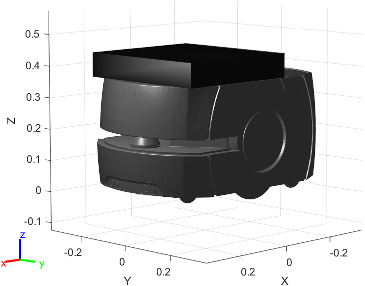
"quanserQBot2e" |
| Quanser QBot 2e mobile robot |
"quanserQCar" |
| Quanser QCar mobile robot |
"rethinkBaxter" |
| Rethink Robotics Baxter 2-armed robot |
"rethinkSawyer" |
| Rethink Robotics Sawyer 7-axis robot |
"robotiq2F85" |
| Robotiq 2F-85 2-finger gripper The gripper can be used with the following list of manipulators:
|
"robotiqEPick4CupVacuumAssembly" |
| Robotiq EPick Gripper with 4 Cup Vacuum Assembly |
"robotiqEPick2CupVacuumAssembly" |
| Robotiq EPick Gripper with 2 Cup Vacuum Assembly |
"robotiqEPickVacuumCup" |
| Robotiq EPick Gripper with Vacuum Cup |
"robotiqEPickVacuumCup200mm" |
| Robotiq EPick Gripper with 200mm Vacuum Cup Extension |
"robotisOP2" |
| ROBOTIS OP2 Humanoid robot |
"robotisOpenManipulator" |
| ROBOTIS OpenMANIPULATOR 4-axis robot with gripper |
"robotisTurtleBot3Burger" |
| ROBOTIS TurtleBot 3 Burger robot |
"robotisTurtleBot3Waffle" |
| ROBOTIS TurtleBot 3 Waffle robot |
"robotisTurtleBot3WaffleForOpenManipulator" |
| ROBOTIS TurtleBot 3 Waffle robot for OpenMANIPULATOR |
"robotisTurtleBot3WafflePi" |
| ROBOTIS TurtleBot 3 Waffle Pi robot |
"robotisTurtleBot3WafflePiForOpenManipulator" |
| ROBOTIS TurtleBot 3 Waffle Pi robot for OpenMANIPULATOR |
"techmanTM5-700" |
| Techman TM5-700 6-axis robot with Camera |
"techmanTM5x-700" |
| Techman TM5X-700 6-axis robot without Camera |
"techmanTM5-900" |
| Techman TM5-900 6-axis robot with Camera |
"techmanTM5x-900" |
| Techman TM5X-900 6-axis robot without Camera |
"techmanTM12" |
| Techman TM12 6-axis robot with Camera |
"techmanTM12x" |
| Techman TM12X 6-axis robot without Camera |
"techmanTM14" |
| Techman TM14 6-axis robot with Camera |
"techmanTM14x" |
| Techman TM14X 6-axis robot without Camera |
"universalUR3" |
| Universal Robots UR3 6-axis robot |
"universalUR3e" |
| Universal Robots UR3e 6-axis robot |
"universalUR5" |
| Universal Robots UR5 6-axis robot |
"universalUR5e" |
| Universal Robots UR5e 6-axis robot |
"universalUR10" |
| Universal Robots UR10 6-axis robot |
"universalUR10e" |
| Universal Robots UR10e 6-axis robot |
"universalUR16e" |
| Universal Robots UR16e 6-axis robot |
"valkyrie" |
| NASA Valkyrie Humanoid robot |
"willowgaragePR2" |
| Willow Garage PR2 mobile robot |
"yaskawaMotomanMH5" |
| Yaskawa Motoman MH5 6-axis robot |






















Data Types: char | string