Configure Root-Level Inport Blocks for C Code Generation
To use code that you generate from a model, you call generated entry-point functions. The calling environment and generated functions exchange input and output data, for example, as global variables or function arguments. Root-level Inport blocks (inports) constitute the input data of the interface. To integrate and deploy the generated code into applications, you can customize how the code generator produces the interface code, including how input data is declared and handled. Customizations can:
Minimize the modifications that you must make to existing code.
Generate stable interfaces that do not change or minimally change when you make changes to your model.
Generate code that exchanges data more efficiently (for example, by using pointers and pass-by-reference arguments for nonscalar data).
For code generation, examples show how to customize the inport
interface for model ConfigurationRapidPrototypingInterface. You can
configure code mappings by using the Code Mappings Editor – C or code
mappings API (coder.mapping.api.CodeMapping).
Choose Customization Options for Inport Interface
By default, root-level inports in a model appear in generated code as fields of a
global data structure named model_ExtU
Whether to set up a default configuration
If a model includes a significant number (for example, more than 10) of root-level inports, it is more efficient to configure the inports with a default setting, and then override that setting for special cases. If the model includes a few root-level inports that have unique source, naming, or placement requirements, consider configuring the inports individually.
How to declare and handle root-level inport data in the generated interface
As separate global variables
To read input data from global variables defined in external code
For referenced model inports, as global variables (
void-void)As calls to access functions. Requires Embedded Coder®
As entry-point function arguments. Requires Embedded Coder
For more information about these options, see Control Data and Function Interface in Generated Code.
Other considerations include whether to:
Name inports in the generated code by using Inport block labels that appear in the model or by using unique code identifiers.
Include the
volatiletype qualifier in global variable definitions and declarations. Requires Embedded Coder. See Protect Global Data with const and volatile Type Qualifiers (Embedded Coder).Place data read into a specific area of memory. Requires Embedded Coder. See Control Data and Function Placement in Memory by Inserting Pragmas (Embedded Coder).
For a list of interface requirements that are relevant to inports with corresponding storage classes and storage class properties, see Choose Storage Class for Controlling Data Representation in Generated Code.
For example model ConfigurationRapidPrototypingInterface, inport interface requirements are:
Get data for root-level inports
In1,In2,In3, andIn4from an external header file. The data read withIn1is used for computing a value that is stored in memory, and then used in an if-else condition of code generated for the Switch block. Data read from the other three inports is used in lookup tablesTable1andTable2.Data for inport
In1must be passed by value.Data for inports
In2,In3, andIn4must be passed by reference.Variables representing the inports in the generated code must be named
input1,input2,input3, andinput4.
For this example, configure inports in ConfigurationRapidPrototypingInterface to meet these code generation requirements.
Configure Default Code Generation Settings for Root-Level Inports
A default code generation setting for root-level inports can reduce the effort of preparing a model for code generation, especially if a model has a significant number of inports. Choose configuration settings once, and the code generator applies those settings to the inports across the model. Simulink® stores the default configuration as part of the model.
Consider configuring default code generation settings for model root-level inports if your model uses multiple root-level inports that do not have unique requirements.
This example shows how to use the Code
Mappings Editor – C to configure default settings
for root-level inports for model ConfigurationRapidPrototypingInterface. Specify that the
inports read input from variables declared in an external header
file.
Open example model
ConfigurationRapidPrototypingInterface. Save a copy of the model to a writable location.
Open the Simulink Coder app.
In the C Code tab, select Code Interface > Default Code Mappings.
In the Code Mappings editor, under Inports and Outports, select category Inports. Set the default storage class to
ImportedExternPointer.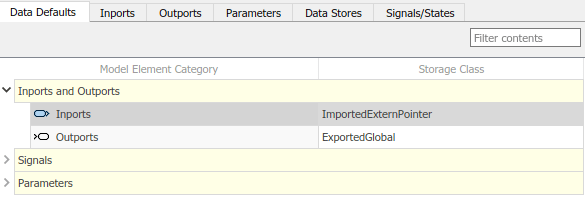
Save the model.
Configure Code Generation Settings for Individual Root-Level Inports
You can configure individual root-level inports for code generation. For example, if a model has two root-level inports that have unique code generation requirements, configure the inports individually. Or, if you configure default settings for inports, configure individual inports to use the default settings or unique settings.
If your model meets at least one of these criteria, consider configuring code generation settings for root-level inports individually:
Uses multiple inports that have unique requirements.
Uses few inports.
Has a default configuration for inports and you need to override the configuration for some specific inports.
This example shows how to use the Code Mappings editor to override the default code
generation configuration for one of the inports in model ConfigurationRapidPrototypingInterface. In the preceding example, you set the default
storage class for inports to ImportedExternPointer.
The example also shows how to configure identifiers that the code generator uses for naming the four inports in the generated code. You can specify code generation identifiers, for example for integration, without having to modify the model design.
If you have not already done so, complete the steps in Configure Default Code Generation Settings for Root-Level Inports.
In the Code Mappings editor, click the Inports tab. The editor lists the names of Inport blocks and bus elements that are in the model. If a port resolves to a signal object, a resolve-to-signal-object icon appears to the right of the element name. The storage class for each inport is set to
Auto, which means that the code generator might eliminate or change the representation of relevant code for optimization purposes. If optimizations are not possible, the code generator applies the model default configuration. For this example, the model default configuration specifies storage classImportedExternPointer.To avoid optimizations and force the code generator to use the default configuration, set the storage class to
Model default.To override the default configuration, specify the storage class that meets the code generation requirements for that inport.
Configure the code generator to apply the default storage class setting to inports
In2,In3, andIn4. Select the rows for the three inports. Then, for one of the selected inports, set the storage class toModel default: ImportedExternPointer.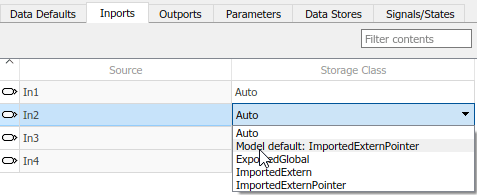
The storage class for the three selected inports changes to
Model default: ImportedExternPointer.For inport
In1, override the default storage class setting. Set the storage class toImportedExtern.
Configure code identifiers for the inports so that the interface argument names in the generated code match the interface names in the external header and definition files. In the Code Mappings editor, select the row for each inport. Click the
 icon and set the
Identifier property to these values.
icon and set the
Identifier property to these values.Inport Code Identifier In1input1In2input2In3input3In4input4Save the model.
Generate and view the code. For example, in
ConfigurationRapidPrototypingInterface.cfind where variablesinput1,input2,input3, andinput4are used in the step entry-point function.void ConfigurationRapidPrototypingInterface_step(void) { mode = ((input1 > 10.0) || (input1 < -10.0)); if (mode) { output = 2.0 * look1_binlc((*input2), rtCP_Table1_bp01Data, rtCP_Table1_tableData, 10U); } else { output = ConfigurationRapidPrototypin_DW.X; } ConfigurationRapidPrototypin_DW.X = look2_binlc((*input3), (*input4), rtCP_Table2_bp01Data, rtCP_Table2_bp02Data, rtCP_Table2_tableData, rtCP_Table2_maxIndex, 3U); }
Configure Code Generation Settings for Root-Level Inports Programmatically
To automate configuration of root-level inports for code generation, use the programming interface for code mappings. For example, when creating custom block libraries or part of an application test environment, use the programming interface to automate data configuration.
This example shows how to use the programming interface to configure default settings
for root-level inports for model ConfigurationRapidPrototypingInterface. Three of the four
inports read input from global pointer variables defined in an external file. You
configure the generated code for inports to read input from global pointer variables
by default. Then, override the default code generation configuration for
In1, which requires that input data be passed by
value.
In addition, you configure code identifiers for the inports so that global variable names in the generated code match the variable names defined in an external file.
Open the example model.
openExample("ConfigurationRapidPrototypingInterface")Create object
cmby calling functioncoder.mapping.api.get. The object stores the data code generation configuration for modelConfigurationRapidPrototypingInterface.cm = coder.mapping.api.get("ConfigurationRapidPrototypingInterface");Configure default settings for inports by calling function
setDataDefault. For the arguments, specify these values:The object returned by
coder.mapping.api.getInportsfor the default categoryProperty name
StorageClasswith property valueImportedExternPointer
setDataDefault(cm,"Inports","StorageClass","ImportedExternPointer")
Verify your default configuration for inports. Issue a call to
getDataDefaultthat specifies the object returned bycoder.mapping.api.get, categoryInports, andStorageClass.getDataDefault(cm,"Inports","StorageClass")
ans = 'ImportedExternPointer'Override the default inport configuration for inport
In1. The requirements for that inport differ from requirements of the other three inports.By default, Simulink sets the storage class for individual inports to
Auto. When the storage class isAuto, the code generator:Determines whether to eliminate the data from the generated code for optimization purposes.
If retaining the data, determines how to efficiently represent the data in the generated code, taking into account default configuration settings.
To control the storage class configuration for an inport, configure settings for the inport with function
setInport. Configure code generated for inportIn1to read input data from global variables defined in an external file, as specified in the requirements. Issue a call to functionsetInportthat specifies the object returned bycoder.mapping.api.get, Inport block namedIn1, property nameStorageClass, and property valueImportedExtern.setInport(cm,"In1","StorageClass","ImportedExtern")
Verify your configuration for inport
In1by calling functiongetInport.getInport(cm,"In1","StorageClass")
ans = 'ImportedExtern'Configure the code generator to apply your default inport settings to inports
In2,In3, andIn4. For each inport, call functionsetInport. Specify the object returned bycoder.mapping.api.get, the Inport block name, property nameStorageClass, and property valueModel default.setInport(cm,"In2","StorageClass","Model default") setInport(cm,"In3","StorageClass","Model default") setInport(cm,"In4","StorageClass","Model default")
Verify your configuration changes for inports
In2,In3, andIn4with calls to functiongetInport.getInport(cm,"In2","StorageClass")
ans = 'Model default'getInport(cm,"In3","StorageClass")
ans = 'Model default'getInport(cm,"In4","StorageClass")
ans = 'Model default'Configure code identifiers for the inports so that the global variables that represent inports in the generated code match the variable names in the external definition file. For each inport, call function
setInport. Specify the object returned bycoder.mapping.api.get, the Inport block name, property nameIdentifier, and one of these property values.Inport Code Identifier In1input1In2input2In3input3In4input4setInport(cm,"In1","Identifier","input1"); setInport(cm,"In2","Identifier","input2"); setInport(cm,"In3","Identifier","input3"); setInport(cm,"In4","Identifier","input4");
Verify your configuration changes for the inports by using calls to function
getInport.getInport(cm,"In1","Identifier")
ans = 'input1'getInport(cm,"In2","Identifier")
ans = 'input2'getInport(cm,"In3","Identifier")
ans = 'input3'getInport(cm,"In4","Identifier")
ans = 'input4'Save the model.
Generate and view the code. For example, in
ConfigurationRapidPrototypingInterface.cfind where variablesinput1,input2,input3, andinput4are used in the step entry-point function.void ConfigurationRapidPrototypingInterface_step(void) { mode = ((input1 > 10.0) || (input1 < -10.0)); if (mode) { output = 2.0 * look1_binlc((*input2), rtCP_Table1_bp01Data, rtCP_Table1_tableData, 10U); } else { output = ConfigurationRapidPrototypin_DW.X; } ConfigurationRapidPrototypin_DW.X = look2_binlc((*input3), (*input4), rtCP_Table2_bp01Data, rtCP_Table2_bp02Data, rtCP_Table2_tableData, rtCP_Table2_maxIndex, 3U); }
Choose Storage Class and Storage Class Properties for Root-Level Inports
Depending on your code generation requirements, choose from these storage classes to configure code generation for root-level inports.
| Requirements | Storage Class for Default Mappings | Storage Class for Individual Mappings |
|---|---|---|
| For data elements that cannot be optimized, represent data as a field of a standard data structure. | Default | |
| Enable optimizations, potentially generating more efficient code. | Auto | |
| Prevent optimizations from eliminating storage for a data element and use the default mapping for the data element category. | Model Default | |
| Generate standalone global variables. Generated code contains the variable declaration and definition. | ExportedGlobal | ExportedGlobal |
| Generate standalone global variables or global variable pointers. Generated code contains the variable or pointer declaration. Your external code provides the definition. | ImportedExtern, ImportedExternPointer | ImportedExtern, ImportedExternPointer |
For an individual inport, use the Identifier storage class property to configure a name for the variable representing the inport in the generated code. If you leave the Identifier property blank, the code generator uses the name of the signal attached to the Inport block. If the signal label is empty, the code generator uses the name of the Inport block.
The list of available storage classes might include other project-specific storage classes defined in an Embedded Coder Dictionary. If you have special requirements that are not met by the listed storage classes and you have Embedded Coder software, you can define a storage class. See Embedded Coder Dictionary (Embedded Coder) and Define Service Interfaces, Storage Classes, Memory Sections, and Function Templates for Software Architecture (Embedded Coder).
Note
The following restrictions apply when mapping a root-level inport to a custom storage class defined in the Embedded Coder Dictionary.
The Data Initialization property must be set to
AutoorDynamic.The const qualifier must be disabled.
See Also
Code
Mappings Editor – C | coder.mapping.api.CodeMapping
Topics
- C Data Code Interface Configuration for Model Interface Elements
- Choose Storage Class for Controlling Data Representation in Generated Code
- Use Built-In and Predefined Storage Classes to Represent Data in Generated Code
- Control Data and Function Interface in Generated Code
- Configure Model Data Elements for ASAP2 File Generation