impinvar
Impulse invariance method for analog-to-digital filter conversion
Description
Examples
Convert a sixth-order analog Butterworth lowpass filter to a digital filter using impulse invariance. Specify a sample rate of 10 Hz and a cutoff frequency of 2 Hz. Display the frequency response of the filter.
f = 2;
fs = 10;
[b,a] = butter(6,2*pi*f,'s');
[bz,az] = impinvar(b,a,fs);
freqz(bz,az,1024,fs)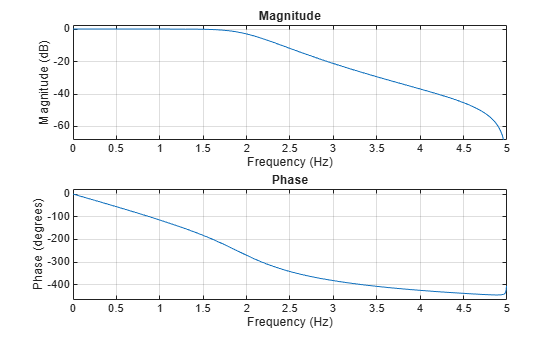
Convert a third-order analog elliptic filter to a digital filter using impulse invariance. Specify a sample rate Hz, a passband edge frequency of 2.5 Hz, a passband ripple of 1 dB, and a stopband attenuation of 60 dB. Display the impulse response of the digital filter.
fs = 10;
[b,a] = ellip(3,1,60,2*pi*2.5,'s');
[bz,az] = impinvar(b,a,fs);
impz(bz,az,[],fs)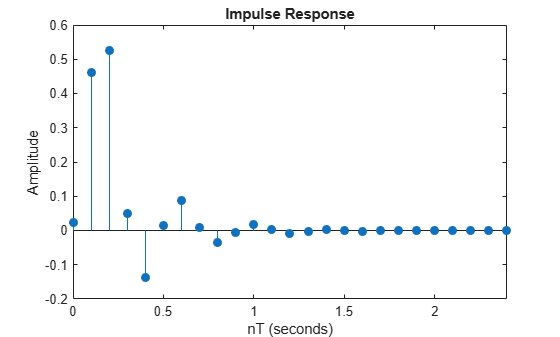
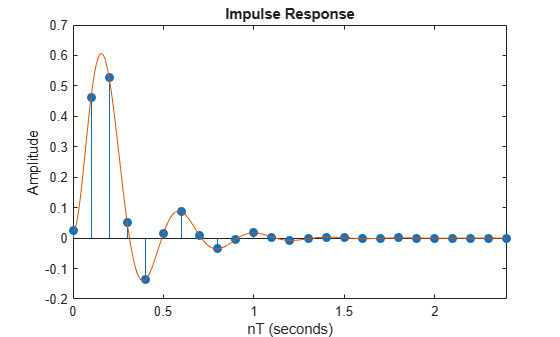
Derive the impulse response of the analog filter by finding the residues, , and poles, , of the transfer function and inverting the Laplace transform explicitly using
Overlay the impulse response of the analog filter. Impulse invariance introduces a gain of to the digital filter. Multiply the analog impulse response by this gain to enable meaningful comparison.
[r,p] = residue(b,a); t = linspace(0,4,1000); h = real(r.'*exp(p.*t)/fs); hold on plot(t,h) hold off
Input Arguments
Output Arguments
Algorithms
impinvar performs the impulse-invariant method of analog-to-digital
transfer function conversion discussed in reference [2]:
It finds the partial fraction expansion of the system represented by
banda.It replaces the poles
pby the polesexp(p/fs).It finds the transfer function coefficients of the system from the residues from step 1 and the poles from step 2.
References
[1] Antoniou, Andreas. Digital Filters. New York: McGraw-Hill, Inc., 1993.
[2] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
Version History
Introduced before R2006a