invfreqz
Identify discrete-time filter parameters from frequency response data
Syntax
Description
Examples
Convert a simple transfer function to frequency response data and then back to the original filter coefficients. Sketch the zeros and poles of the function.
a = [1 2 3 2 1 4]; b = [1 2 3 2 3]; [h,w] = freqz(b,a,64); [bb,aa] = invfreqz(h,w,4,5)
bb = 1×5 complex
1.0000 + 0.0000i 2.0000 + 0.0000i 3.0000 + 0.0000i 2.0000 + 0.0000i 3.0000 + 0.0000i
aa = 1×6
1.0000 2.0000 3.0000 2.0000 1.0000 4.0000
zplane(bb,aa)
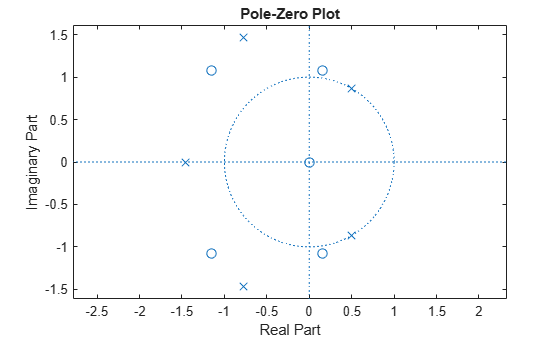
bb and aa are equivalent to b and a, respectively. However, the system is unstable because it has poles outside the unit circle. Use invfreqz's iterative algorithm to find a stable approximation to the system. Verify that the poles are within the unit circle.
[bbb,aaa] = invfreqz(h,w,4,5,[],30)
bbb = 1×5 complex
0.2427 + 0.0000i 0.2788 + 0.0000i 0.0069 + 0.0000i 0.0971 + 0.0000i 0.1980 + 0.0000i
aaa = 1×6
1.0000 -0.8944 0.6954 0.9997 -0.8933 0.6949
zplane(bbb,aaa)

Input Arguments
Output Arguments
Algorithms
By default, invfreqz uses an equation error method to identify the best
model from the data. The method finds b and a in
by creating a system of linear equations and solving them with the MATLAB®
\ operator. Here A(ω(k)) and
B(ω(k)) are the Fourier transforms of the polynomials a and
b, respectively, at the frequency ω(k), and
n is the number of frequency points (the length of h
and w). This algorithm is a based on Levi [1].
The superior ("output-error") algorithm uses the damped Gauss-Newton method for iterative search [2], with the output of the first algorithm as the initial estimate. This solves the direct problem of minimizing the weighted sum of the squared error between the actual and the desired frequency response points.
References
[1] Levi, E. C. “Complex-Curve Fitting.” IRE Transactions on Automatic Control. Vol. AC-4, 1959, pp. 37–44.
[2] Dennis, J. E., Jr., and R. B. Schnabel. Numerical Methods for Unconstrained Optimization and Nonlinear Equations. Englewood Cliffs, NJ: Prentice-Hall, 1983.