sosfilt
Second-order (biquadratic) IIR digital filtering
Description
y = sosfilt(sos,x)sos to the input signal
x.
If
xis a matrix, then the function operates along the first dimension and returns the filtered data for each column.If
xis a multidimensional array, then the function operates along the first array dimension with size greater than 1.
Examples
Load chirp.mat. The file contains a signal, y, that has most of its power above Fs/4, or half the Nyquist frequency. The sample rate is 8192 Hz.
load chirp
t = (0:length(y)-1)/Fs;Design a seventh-order Butterworth highpass filter to attenuate the components of the signal below Fs/4. Use a normalized cutoff frequency of 0.48π rad/sample. Express the filter coefficients in terms of second-order sections.
[zhi,phi,khi] = butter(7,0.48,'high');
soshi = zp2sos(zhi,phi,khi);
freqz(soshi)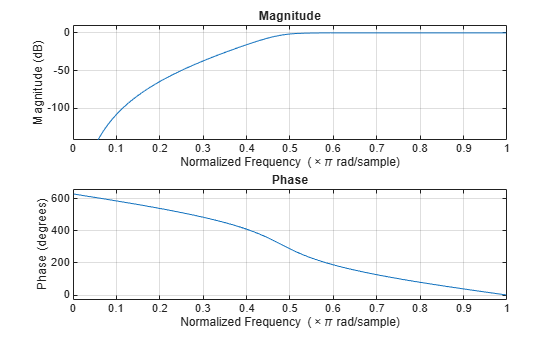
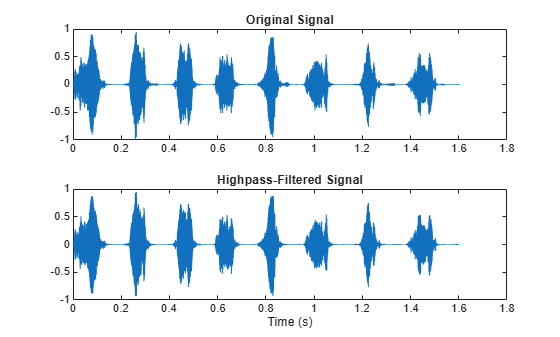
Filter the signal. Display the original and highpass-filtered signals. Use the same y-axis scale for both plots.
outhi = sosfilt(soshi,y); figure subplot(2,1,1) plot(t,y) title('Original Signal') ys = ylim; subplot(2,1,2) plot(t,outhi) title('Highpass-Filtered Signal') xlabel('Time (s)') ylim(ys)
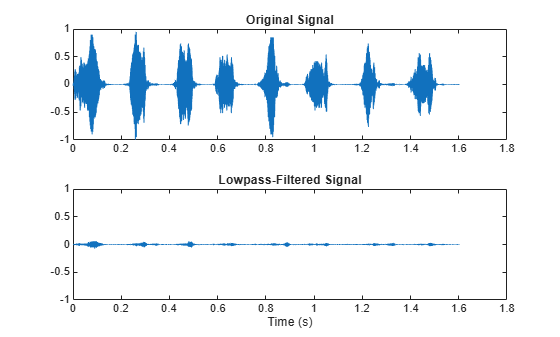
Design a lowpass filter with the same specifications. Filter the signal and compare the result to the original. Use the same y-axis scale for both plots. The result is mostly noise.
[zlo,plo,klo] = butter(7,0.48); soslo = zp2sos(zlo,plo,klo); outlo = sosfilt(soslo,y); subplot(2,1,1) plot(t,y) title('Original Signal') ys = ylim; subplot(2,1,2) plot(t,outlo) title('Lowpass-Filtered Signal') xlabel('Time (s)') ylim(ys)
Input Arguments
Output Arguments
References
[1] Bank, Balázs. "Converting Infinite Impulse Response Filters to Parallel Form". IEEE Signal Processing Magazine. Vol. 35, Number 3, May 2018, pp. 124-130.
[2] Orfanidis, Sophocles J. Introduction to Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1996.
Extended Capabilities
Version History
Introduced before R2006a
See Also
filter | medfilt1 | sgolayfilt