Continuous
Use blocks from the Continuous library to model differential equations. You can take the time derivative of a signal. You can integrate or delay a signal. You can model PID controllers and linear systems using transfer function or state-space representations.
Blocks
| Derivative | Compute approximate continuous derivative of continuous input signal with respect to time |
| Descriptor State-Space | Model continuous linear system as system of implicit state-space equations |
| Entity Transport Delay | Introduce a delay in propagation of a SimEvents message |
| First Order Hold | Implement linearly extrapolated first order hold on input signal |
| Integrator | Integrate signal |
| Integrator Limited | Integrate signal |
| PID Controller | Continuous-time or discrete-time PID controller |
| PID Controller (2DOF) | Continuous-time or discrete-time two-degree-of-freedom PID controller |
| Second-Order Integrator | Second-order integration of input signal |
| Second-Order Integrator Limited | Second-order integration of input signal |
| State-Space | Model continuous linear system as system of explicit state-space equations |
| Transfer Fcn | Model linear system as transfer function |
| Transport Delay | Delay input by given amount of time |
| Variable Time Delay | Delay input by variable amount of time |
| Variable Transport Delay | Delay input by variable amount of time |
| Zero-Pole | Model system using zero-pole-gain transfer function |
Topics
- Model a Continuous System
Model a system with variables defined at all time values.
Featured Examples
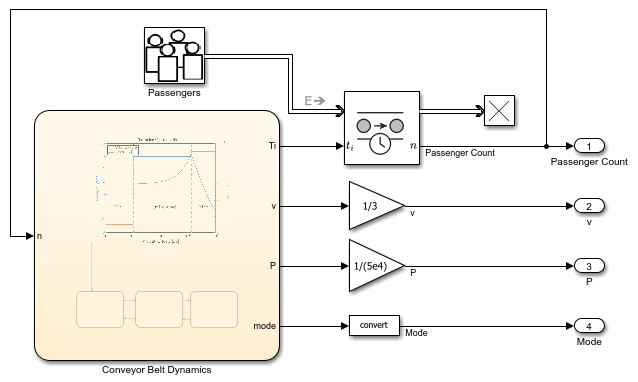
Model Conveyor Belt as Cyber-Physical System
Model a variable-speed conveyor belt as a cyber-physical system by combining continuous-time, discrete-event, and finite-state modeling techniques. The model in this example integrates the modeling techniques required to represent the cyber-physical system into a single simulation environment by using Simulink®, SimEvents®, and Stateflow®.
Teaching Resources

Virtual Hardware and Labs for Controls
Learn the concepts of building open/closed loop feedback control systems, computing transfer functions, and performing position analysis.