environment
Environmental inputs for UAV
Description
envStruct = environment(uavGuidanceModel)derivative
function to get the state time-derivative of the UAV.
Examples
Create a UAV scenario with default properties. Set the duration for 15 seconds.
scene = uavScenario; duration = 15;
Create a UAV platform with a fixed wing UAV guidance model.
p = uavPlatform("UAV",scene);
uavModel = fixedwing;Create a UAV state vector and set the initial condition at a height of 30 m and airspeed of 25 m/s.
s = state(uavModel); s(3:4) = [30 25];
Create a control command structure. Set the UAV to fly at an airspeed of 25 m/s at a height of 30 m.
u = control(uavModel); u.AirSpeed = 25; u.Height = 30;
Create environment input structure.
e = environment(uavModel);
Create and add headwind gust starting at 5 second into the flight.
w = uavWindGust(GustAmplitude=[-5 0 0],StartTime=5); addWind(p, w);
Create empty vectors for storing wind velocity, ground speed, and time.
wv = zeros(scene.UpdateRate*duration, 3); gs = zeros(scene.UpdateRate*duration, 1); ts = zeros(scene.UpdateRate*duration, 1); idx = 1;
Set up the scenario.
setup(scene)
Run the simulation. In each time step, obtain the wind velocity vector and update the environment input structure with the wind velocity.
while scene.CurrentTime <= duration % Read the UAV motion vector motion = read(p); % Obtain wind velocity vector in body frame. wv(idx, :) = windVelocity(p); % Create transformation matrix. quat = motion(10:13); rotm = quat2rotm(quat); % Transform wind velocity to NED frame using the transformation matrix. wNED = rotm*wv(idx,:)'; % Update the environment input structure. e.WindNorth = wNED(1); e.WindEast = wNED(2); e.WindDown = wNED(3); % Obtain the time derivative of the UAV states. sdot = derivative(uavModel, s, u, e); % Integrate the state derivative to obtain the next state s = s + sdot/scene.UpdateRate; % Update the UAV motion vector. motion(1:3) = s(1:3); motion(4:5) = sdot(1:2); motion(6) = -sdot(3); % Obtain the UAV ground speed. gs(idx) = norm(motion(4:6)); % Obtain the current time. ts(idx)=scene.CurrentTime; % Move the UAV to next position. move(p, motion); idx = idx + 1; % Advance the scenario time step. advance(scene); end
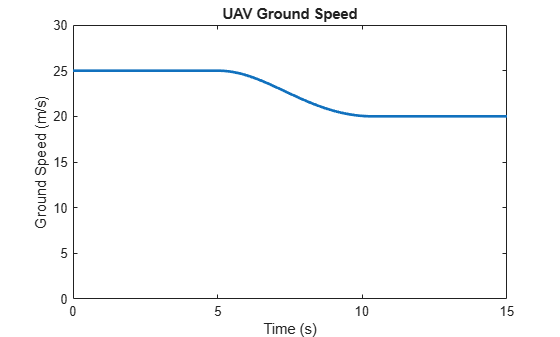
Plot the ground speed of the UAV.
figure(); plot(ts, gs, LineWidth=2); ylim([0 30]) title("UAV Ground Speed") xlabel("Time (s)") ylabel("Ground Speed (m/s)")
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2018b