connect
Connect poses with UAV Dubins connection path
Syntax
Description
[
connects the start and goal poses using the specified pathSegObj,pathCost] = connect(connectionObj,start,goal)uavDubinsConnection object.
The path segment object with the lowest cost is returned.
[
returns all possible path segments as a cell array with their associated costs.pathSegObj,pathCost] = connect(connectionObj,start,goal,'PathSegments','all')
Examples
This example shows how to calculate all valid UAV Dubins path segments and connect poses using the uavDubinsConnection object.
Calculate All Possible Path Segments
Create a uavDubinsConnection object.
connectionObj = uavDubinsConnection;
Define start and goal poses as [x, y, z, headingAngle] vectors.
startPose = [0 0 0 0]; % [meters, meters, meters, radians]
goalPose = [0 0 20 pi];Calculate all possible path segments and connect the poses.
[pathSegObj,pathCosts] = connect(connectionObj,startPose,goalPose,'PathSegments','all');
Path Validation and Visualization
Check the validity of all the possible path segments and display the valid paths along with their motion type and path cost.
for i = 1:length(pathSegObj) if ~isnan(pathSegObj{i}.Length) figure show(pathSegObj{i}) fprintf('Motion Type: %s\nPath Cost: %f\n',strjoin(pathSegObj{i}.MotionTypes),pathCosts(i)); end end
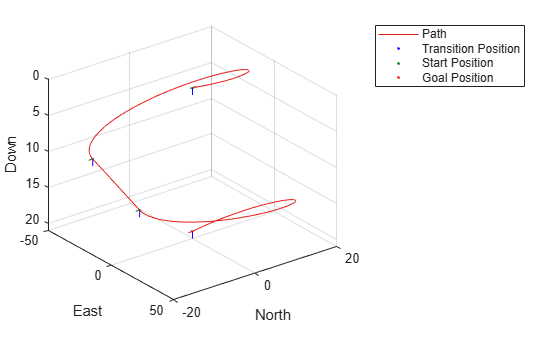
Motion Type: L S L N Path Cost: 214.332271
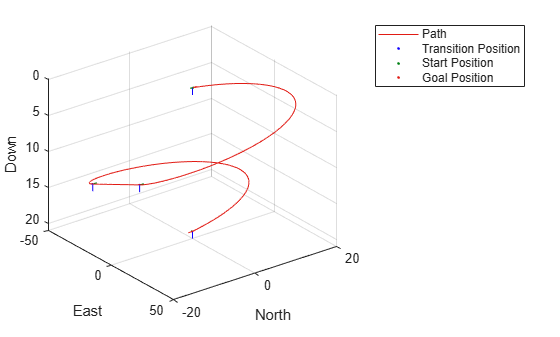
Motion Type: R S R N Path Cost: 214.332271
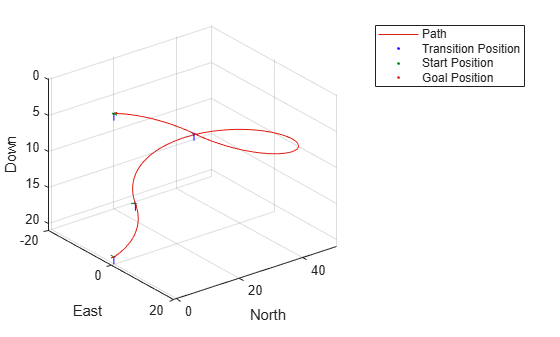
Motion Type: R L R N Path Cost: 138.373157
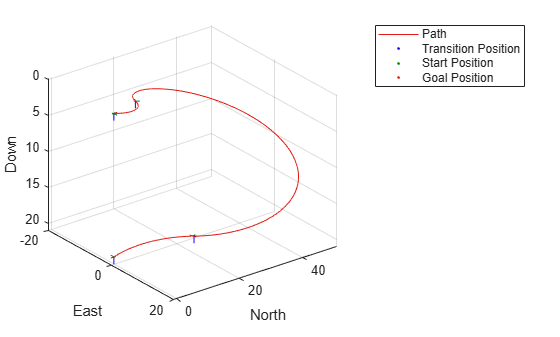
Motion Type: L R L N Path Cost: 138.373157
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019b