uavDubinsPathSegment
Dubins path segment connecting two poses of UAV
Description
The uavDubinsPathSegment object holds information for a Dubins
path segment that connects start and goal poses of a UAV as a sequence of motions in the
north-east-down coordinate system.
The motion options are:
Straight
Left turn (counterclockwise)
Right turn (clockwise)
Helix left turn (counterclockwise)
Helix right turn (clockwise)
No motion
The turn direction is defined as viewed from the top of the UAV. Helical motions are used to ascend or descend.
Creation
Syntax
Description
To generate a uavDubinsPathSegment object, use the connect function
with a uavDubinsConnection
object:
pathSegObj = connect(connectionObj,StartPose,GoalPose)uavDubinsConnection
object.
To specifically define a path segment:
pathSegObj = uavDubinsPathSegment(connectionObj,StartPose,GoalPose)uavDubinsConnection object
provides the minimum turning radius and flight path angle. It internally computes the
optimal path and assigns it to pathSegObj.
pathSegObj = uavDubinsPathSegment(connectionObj,StartPose,GoalPose,MotionTypes)MotionTypes.
pathSegObj = uavDubinsPathSegment(StartPose,GoalPose,FlightPathAngle,AirSpeed,MinTurningRadius,HelixRadius,MotionTypes,MotionLengths)
Input Arguments
Properties
Object Functions
interpolate | Interpolate poses along UAV Dubins path segment |
show | Visualize UAV Dubins path segment |
Examples
This example shows how to calculate a UAV Dubins path segment and connect poses using the uavDubinsConnection object for a specified motion type.
Create a uavDubinsConnection object.
connectionObj = uavDubinsConnection;
Define start and goal poses as [x, y, z, headingAngle] vectors.
startPose = [0 0 0 0]; % [meters, meters, meters, radians]
goalPose = [0 0 20 pi];Calculate a valid path segment and connect the poses for a specified motion type.
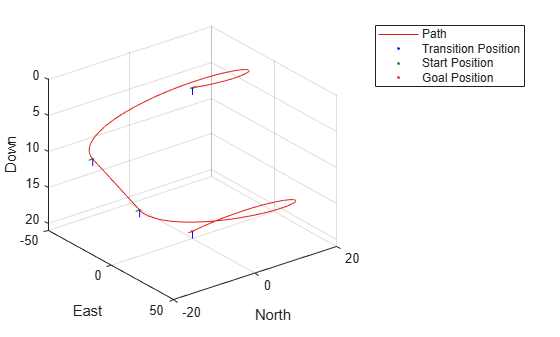
pathSegObj = uavDubinsPathSegment(connectionObj,startPose,goalPose,{'L','S','L','N'});Show the generated path.
show(pathSegObj)
Verify the motion type of the returned path segment.
fprintf('Motion Type: %s\n',strjoin(pathSegObj.MotionTypes));Motion Type: L S L N
Extended Capabilities
Version History
Introduced in R2019b