Building Graphical Aircraft Design Tools
From the series: Aerospace
Zachary Lietzau, Embry-Riddle Aeronautical University
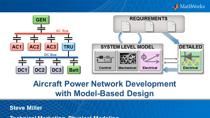
To enable rapid development of model airplanes, Zachary Lietzau of Embry-Riddle Aeronautical University used MATLAB® to develop an app that enabled his team to quickly iterate model aircraft designs. The benefits of using apps in MATLAB include the ability to use MATLAB toolboxes to run complicated calculations and visualize results in an interactive environment.
Many MATLAB products have built-in apps. Apps can also be downloaded from File Exchange or developed by users—just like how Zachary built the app in this video. MATLAB App Designer is an environment for building MATLAB apps. It provides a drag and drop environment to lay out the visual components of a user interface as well as an environment to enter computational algorithms to program app behavior.
User-developed apps can be packaged into a single file that can be distributed to others if the users have access to all the products used in the app. This is particularly useful to student competition teams as apps can be built and shared with future teams to help maintain legacy tools and minimize the time needed to redesign tools from year to year. Documentation can be added to the apps to ensure seamless transition to other team members.
Download the app from MATLAB Central's File Exchange.
Published: 1 Nov 2017