Single-Acting Actuator (IL)
Single-acting linear actuator in an isothermal liquid system

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Actuators
Description
The Single-Acting Actuator (IL) block represents an actuator that converts the liquid pressure at port A into a mechanical force at port R via an extending-retracting piston. The piston motion is limited by a hard stop model. When the piston position is calculated internally, it is reported at port p, and when the position is set by a connection to a Simscape™ Multibody™ joint, it is received as a physical signal at port p.
The Initial piston displacement, Enable dynamic compressibility, and reference environmental pressure can be modified. Fluid and mechanical inertia are not modeled.
Displacement
The piston displacement is measured as the position at port R relative
to port C. The Mechanical orientation
identifies the direction of piston displacement. The piston displacement is neutral,
or 0, when the chamber volume is equal to the Dead
volume. When displacement is received as an input, ensure that the
derivative of the position is equal to the piston velocity. This is automatically
the case when the input is received from a Translational Multibody Interface block
connection to a Simscape Multibody joint.
Hard Stop Model
Four models are available to model the extension limit of the actuator piston. This block uses a similar formulation as the Translational Hard Stop block and models uniform damping and stiffness coefficients at both ends of the piston stroke. For more information on the hard stop model options, see the Translational Hard Stop block.
The hard stop force is modeled when the piston is at its upper or lower bound. The boundary region is within the Transition region of the Piston stroke or Piston initial displacement. Outside of this region,
Cushion
The block can model cushioning toward the extremes of the piston stroke. Select Cylinder end cushioning to slow the piston motion as it approaches the maximum extension, defined by the Piston stroke parameter. For more information on the functionality of a cylinder cushion, see the Cylinder Cushion (IL) block.
Friction
The block can model friction against piston motion. When you select Cylinder friction, the resulting friction is a combination of the Stribeck, Coulomb, and viscous effects. The block measures the pressure difference between the chamber pressure and the environment pressure. For more information on the friction model and its limitations, see the Cylinder Friction (IL) block.
Numerically-Smoothed Area and Pressure
You can maintain numerical robustness in your simulation by adjusting the Smoothing factor parameter. If the Smoothing factor parameter is nonzero, the block smooths the cushion orifice area and the check valve pressure range. The orifice area is smoothly saturated between the Leakage area between plunger and cushion sleeve and Cushion plunger cross-sectional area parameters while the valve pressure is saturated between the Check valve cracking pressure differential and Check valve maximum pressure differential parameters. For more information, see Numerical Smoothing.
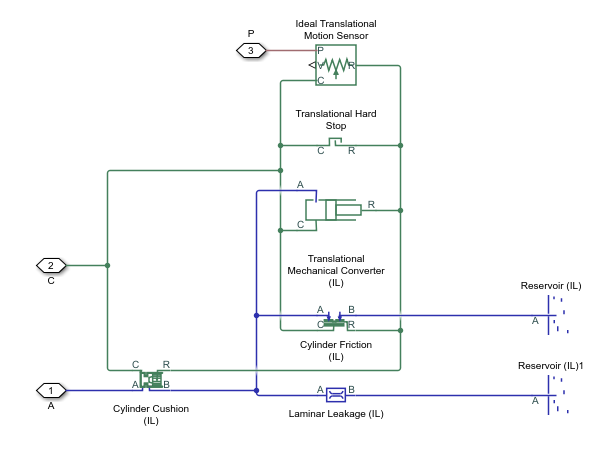
Block Sub-Components
The Single-Acting Actuator (IL) block comprises four Simscape Foundation and two Fluids Library blocks:
Examples

Closed-Circuit Hydraulic Actuator
A closed-circuit hydraulic actuator driven by a variable-speed pump. The actuator is arranged as a closed fluid system with two replenishment valves (check valves) and a spring-loaded accumulator serving as a replenishment reservoir. The pump speed is controlled by the difference between the commanded and measured piston position. The actuator acts against a spring, a damper, and a time-varying load.

Drill-Ream Actuator
An actuator that drives a machine tool working unit performing a sequence of three technological operations: coarse drilling, fine drilling, and reaming. One of three pressure-compensated flow control valves controls the actuator speed as metering out return flow from the cylinder. Directional valves that are activated by a control unit perform the selection of an appropriate flow control.

Front-Loader Actuation System
A simple actuation system that has a lift and tilt cylinder. Each cylinder is controlled by an open center, 6-way, 3-position directional valve. The valves are connected in series through their unloading branch such that the system pump unloads when both spool displacements are in neutral position. If either tilt or lift command applies, the unloading path closes.