sicklidar2d
Description
Add-On Required: This feature requires the Lidar Toolbox Support Package for SICK Lidar Sensors add-on.
The sicklidar2d object can stream lidar scans from a SICK® 2-D lidar sensor. Using this object, you can read and preview the incoming lidar
scan data.
Creation
Description
slObj = sicklidar2dsicklidar2d object, slObj, that can stream 2-D lidar
scans from a SICK 2-D lidar sensor over a TCP/IP interface using the SICK Command Language ASCII (CoLa A) protocol.
Note
Before you create a sicklidar2d object in MATLAB®, you must close any other software that is using the SICK 2-D lidar sensor.
slObj = sicklidar2d(Name=Value)Timeout=20 sets the timeout value to 20 seconds.
Name-Value Arguments
Properties
Object Functions
Examples
Create a sicklidar2d object. Ensure that you specify the correct IP address for your sensor.
slObj = sicklidar2d(IPAddress="172.18.252.146");Read the latest 2-D lidar scan by using the read function of the sicklidar2d object.
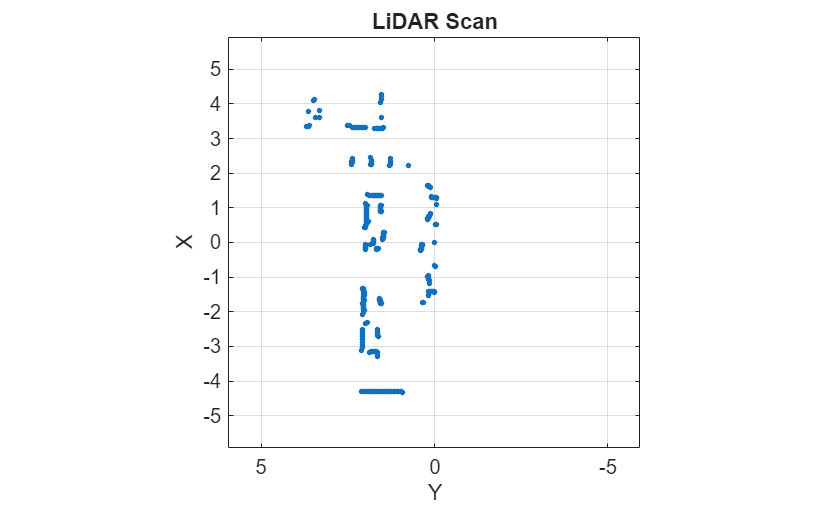
scan = read(slObj);
Plot all the points of the lidar scan.
plot(scan)
Version History
Introduced in R2026a