rotate
Rotate geometry
Description
h = rotate(g,theta,refpoint1,refpoint2)
Examples
Rotate a geometry with and without specifying the reference point for the axis of rotation.
Create a model.
model = createpde;
Import and plot a geometry.
g = importGeometry(model,"PlateHolePlanar.stl");
pdegplot(g)
Mesh the geometry and plot the mesh.
generateMesh(model); figure pdemesh(model)
Rotate the geometry around the default z-axis by 45 degrees. Plot the result.
rotate(g,45); figure pdegplot(g)
Plot the geometry and mesh. The rotate function modifies a geometry, but it does not modify a mesh.
figure
pdegplot(g)
hold on
pdemesh(model)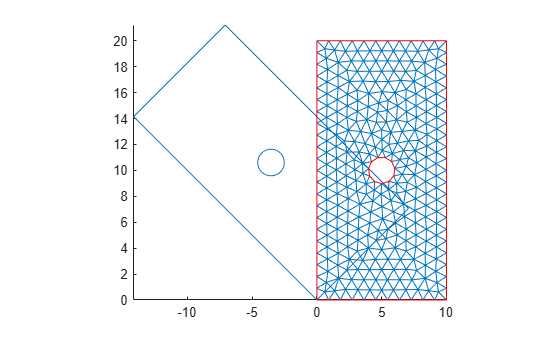
After modifying the geometry, always regenerate the mesh.
generateMesh(model);
figure
pdegplot(g)
hold on
pdemesh(model)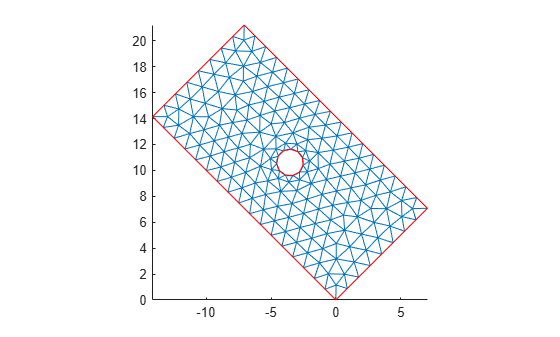
Restore the original geometry position.
rotate(g,-45);
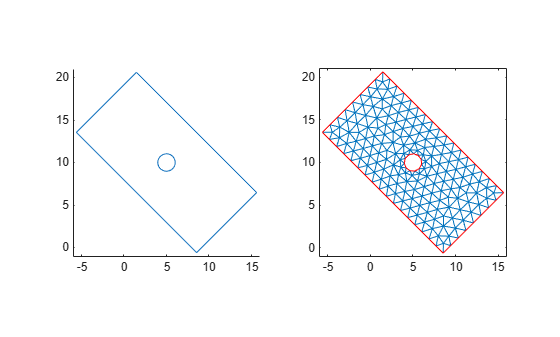
Rotate the geometry by the same angle, but this time use the center of the geometry as a reference point. The axis of rotation is the line in the z-direction passing through the reference point.
rotate(g,45,[5 10]);
Regenerate the mesh.
generateMesh(model);
Plot the resulting geometry and mesh.
figure subplot(1,2,1) pdegplot(model) axis([-6 16 -1 21]) subplot(1,2,2) pdemesh(model) axis([-6 16 -1 21])
Rotate a geometry with and without specifying the reference points for the axis of rotation.
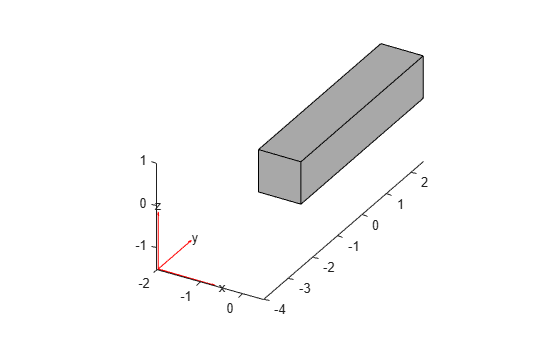
Create and plot a geometry.
g = multicuboid(1,5,1); pdegplot(g)
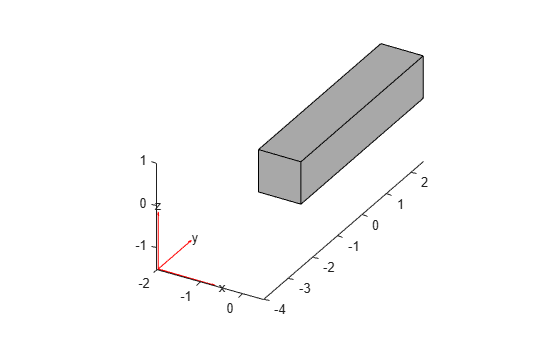
Rotate a 3-D geometry around the default z-axis by 45 degrees. Plot the result.
rotate(g,45); pdegplot(g)
Restore the original geometry position.
rotate(g,-45); pdegplot(g)
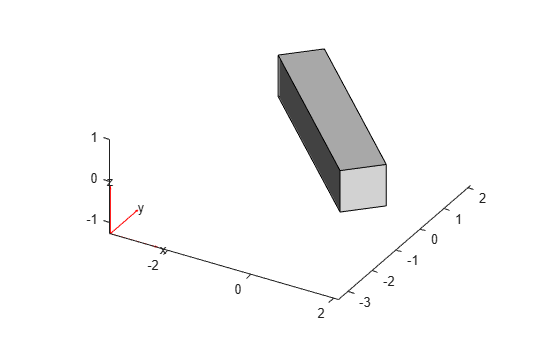
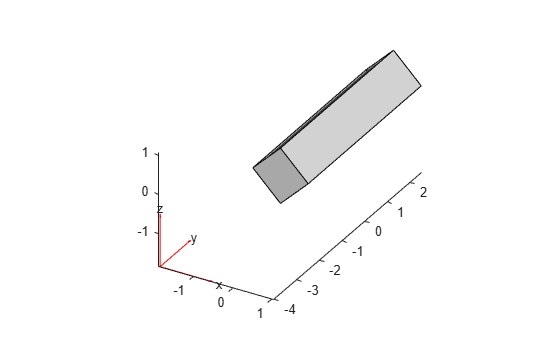
Rotate the geometry by the same angle, but this time around the y-axis.
rotate(g,45,[0 0 0],[0 1 0]); pdegplot(g)
Input Arguments
Output Arguments
Tips
After modifying a geometry, regenerate the mesh to ensure a proper mesh association with the new geometry.
If
gis anfegeometryorAnalyticGeometryobject, and you want to replace it with the modified geometry, assign the output to the original geometry, for example,g = rotate(g,90).