Get Started
If the intended end goal of your application involves standalone manipulation of the KINOVA Gen3 robot only, control and connectivity workflow using matlab_kortex API is an ideal solution. However, in the majority of the robotics use-cases, the environment consists of multiple robots and sensors, and the standalone manipulation is not common. In such scenarios, ROS is widely used due to inherent advantages of hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and so on.
For more information on the comparison between these two interfaces, refer to Select Interface for Connecting to Kinova Gen3 Robot. The support package includes examples to control individual joint angles and Cartesian pose of the robot. More advanced examples demonstrate how to use Robotics System Toolbox features to compute joint angles required to track a smooth trajectory in 3D space and command the robot to track the pre-computed trajectory.
Topics
- Verify Connection to Kinova Gen 3 Robot
Verify network connection to Gen3 robot from MATLAB®.
- Clear Existing Faults
Clear existing faults while working with Gen3 robot.
- Get Latest URDF Robot Model for Kinova Gen3 Robot
Update URDF to the latest version, if required.
- Select Interface for Connecting to Kinova Gen3 Robot
Use either matlab_kortex or ros_kortex for connection.
Troubleshooting
Troubleshooting Manipulator Support Package
Troubleshoot issues with manipulating Gen3 robot using the support package and understand the limitations.
Featured Examples

Connect to Kinova Gen3 Robot and Manipulate the Arm Using MATLAB
Connect Kinova Gen3 7-DoF Ultralightweight Robot to MATLAB to get feedback from it and send control commands.

Track Pre-Computed Trajectory of Kinova Gen3 Robot End-Effector Using Inverse Kinematics and KINOVA KORTEX MATLAB API
Solve inverse kinematics problems and move the Kinova Gen3 7-DoF Ultralightweight Robot arm to follow the desired trajectory.

Generate a Trajectory Using a Set of Waypoints for KINOVA Gen3 Robot End-Effector
Generate and interpolate trajectories for a robot arm from a set of waypoints such as cubic polynomials, quintic polynomials, and trapezoidal trajectories.

Control KINOVA Gen3 Robotic Manipulator Using KINOVA KORTEX System Object and Simulink
Connect Kinova Gen3 7-DoF Ultralightweight Robot to Simulink® to get feedback from it and send control commands.

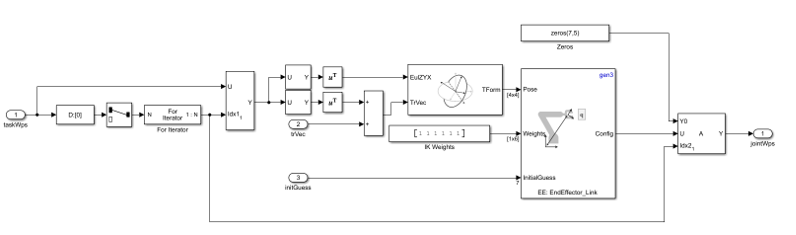
Control Cartesian Position of KINOVA Gen3 Robot End-Effector Using Inverse Kinematics Block and KINOVA KORTEX System Object
Solve inverse kinematics problems using rigid body trees and control KINOVA Gen3 7-DoF Ultralightweight Robot Arm to follow the desired trajectory.

Generate Colorized Point Cloud Using Vision Module of Kinova Gen3 Robot
Connect to Kinova Gen3 7-DoF Ultralightweight Robot cameras and get the RGB and depth streams.

Read Current Joint Angles from KINOVA Gen3 Robot Arm
Connect to KINOVA Gen3 7-DoF Ultralightweight Robot arm with Simulink using Robot Operating System (ROS) to read current joint angles.

Control Individual Joint Angle of KINOVA Gen3 Robot
Get feedback from KINOVA Gen3 and then send commands to it to reach a particular joint configuration using ROS with Simulink.

Send KINOVA Gen3 Robot Arm to Desired Cartesian Pose
Send KINOVA Gen3 Robot Arm to desired Cartesian pose using ROS with Simulink.
Send Precomputed Trajectory to KINOVA Gen3 Robot Arm
Get feedback from KINOVA Gen3 and then send commands to it to follow a precomputed joint trajectory using ROS with Simulink.