robotPlatform
Description
The robotPlatform object represents a robot platform in a given
robot scenario. Use the platform to define and track the trajectory of an object in the
scenario. To simulate sensor readings for the platform, mount sensors such as the gpsSensor,
insSensor, and
robotLidarPointCloudGenerator
System object™ to the platform as robotSensor
objects. Add a body mesh to the platform for visualization using the updateMesh
object function.
Creation
Description
platform = robotPlatform(name,scenario)name and adds it to the
scenario, specified as a robotScenario
object. Specify the name argument as a string scalar. The
name argument sets the Name
property.
platform = robotPlatform(___,Name=Value)
Name-Value Arguments
Properties
Object Functions
attach | Attach target robot platform to source robot platform |
checkCollision | Check collision between robot platform and target bodies |
detach | Detach target robot platform from source robot platform |
move | Move robot platform in scenario |
read | Read robot platform in scenario |
updateMesh | Update robot platform body mesh |
Examples
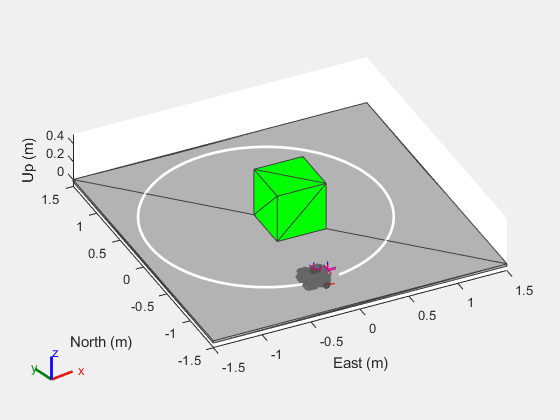
Create a robot scenario.
scenario = robotScenario(UpdateRate=100,StopTime=1);
Add the ground plane and a box as meshes.
addMesh(scenario,"Plane",Size=[3 3],Color=[0.7 0.7 0.7]); addMesh(scenario,"Box",Size=[0.5 0.5 0.5],Position=[0 0 0.25], ... Color=[0 1 0])
Create a waypoint trajectory for the robot platform using an ENU reference frame.
waypoint = [0 -1 0; 1 0 0; -1 1 0; 0 -1 0]; toa = linspace(0,1,length(waypoint)); traj = waypointTrajectory("Waypoints",waypoint, ... "TimeOfArrival",toa, ... "ReferenceFrame","ENU");
Create a rigidBodyTree object of the TurtleBot 3 Waffle Pi robot with loadrobot.
robotRBT = loadrobot("robotisTurtleBot3WafflePi");Create a robot platform with trajectory.
platform = robotPlatform("TurtleBot",scenario, ... BaseTrajectory=traj);
Set up platform mesh with the rigidBodyTree object.
updateMesh(platform,"RigidBodyTree",Object=robotRBT)Create an INS sensor object and attach the sensor to the platform.
ins = robotSensor("INS",platform,insSensor("RollAccuracy",0), ... UpdateRate=scenario.UpdateRate);
Visualize the scenario.
[ax,plotFrames] = show3D(scenario); axis equal hold on
In a loop, step through the trajectory to output the position, orientation, velocity, acceleration, and angular velocity.
count = 1; while ~isDone(traj) [Position(count,:),Orientation(count,:),Velocity(count,:), ... Acceleration(count,:),AngularVelocity(count,:)] = traj(); count = count+1; end
Create a line plot for the trajectory. First create the plot with plot3, then manually modify the data source properties of the plot. This improves the performance of the plotting.
trajPlot = plot3(nan,nan,nan,"Color",[1 1 1],"LineWidth",2); trajPlot.XDataSource = "Position(:,1)"; trajPlot.YDataSource = "Position(:,2)"; trajPlot.ZDataSource = "Position(:,3)";
Set up the simulation. Then, iterate through the positions and show the scene each time the INS sensor updates. Advance the scene, move the robot platform, and update the sensors.
setup(scenario) for idx = 1:count-1 % Read sensor readings. [isUpdated,insTimestamp(idx,1),sensorReadings(idx)] = read(ins); if isUpdated % Use fast update to move platform visualization frames. show3D(scenario,FastUpdate=true,Parent=ax); % Refresh all plot data and visualize. refreshdata drawnow limitrate end % Advance scenario simulation time. advance(scenario); % Update all sensors in the scene. updateSensors(scenario) end hold off
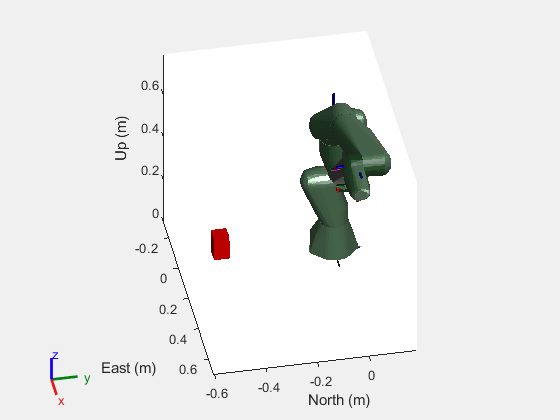
Create a robotScenario object.
scenario = robotScenario(UpdateRate=1,StopTime=10);
Create a rigidBodyTree object of the Franka Emika Panda manipulator using loadrobot.
robotRBT = loadrobot("frankaEmikaPanda");Create a rigidBodyTree-based robotPlatform object using the manipulator model.
robot = robotPlatform("Manipulator",scenario, ... RigidBodyTree=robotRBT);
Create a non-rigidBodyTree-based robotPlatform object of a box to manipulate. Specify the mesh type and size.
box = robotPlatform("Box",scenario,Collision="mesh", ... InitialBasePosition=[0.5 0.15 0.278]); updateMesh(box,"Cuboid",Collision="mesh",Size=[0.06 0.06 0.1])
Visualize the scenario.
ax = show3D(scenario,Collisions="on");
view(79,36)
lightSpecify the initial and the pick-up joint configuration of the manipulator, to move the manipulator from its initial pose to close to the box.
initialConfig = homeConfiguration(robot.RigidBodyTree);
pickUpConfig = [0.2371 -0.0200 0.0542 -2.2272 0.0013 ...
2.2072 -0.9670 0.0400 0.0400];Create an RRT path planner using the manipulatorRRT object, and specify the manipulator model.
planner = manipulatorRRT(robot.RigidBodyTree,scenario.CollisionMeshes); planner.IgnoreSelfCollision = true;
Plan the path between the initial and the pick-up joint configurations. Then, to visualize the entire path, interpolate the path into small steps.
rng("default")
path = plan(planner,initialConfig,pickUpConfig);
path = interpolate(planner,path,25);Set up the simulation.
setup(scenario)
Check the collision before manipulator picks up the box.
checkCollision(robot,"Box", ... IgnoreSelfCollision="on")
ans = logical
0
Move the joints of the manipulator along the path and visualize the scenario.
helperRobotMove(path,robot,scenario,ax)
Check the collision after manipulator picks up the box.
checkCollision(robot,"Box", ... IgnoreSelfCollision="on")
ans = logical
1
Use the attach function to attach the box to the gripper of the manipulator.
attach(robot,"Box","panda_hand", ... ChildToParentTransform=trvec2tform([0 0 0.1]))
Specify the drop-off joint configuration of the manipulator to move the manipulator from its pick-up pose to the box drop-off pose.
dropOffConfig = [-0.6564 0.2885 -0.3187 -1.5941 0.1103 ...
1.8678 -0.2344 0.04 0.04];Plan the path between the pick-up and drop-off joint configurations.
path = plan(planner,pickUpConfig,dropOffConfig); path = interpolate(planner,path,25);
Move the joints of the manipulator along the path and visualize the scenario.
helperRobotMove(path,robot,scenario,ax)
Use the detach function to detach the box from the manipulator gripper.
detach(robot)
Plan the path between the drop-off and initial joint configurations to move the manipulator from its box drop-off pose to its initial pose.
path = plan(planner,dropOffConfig,initialConfig); path = interpolate(planner,path,25);
Move the joints of the manipulator along the path and visualize the scenario.
helperRobotMove(path,robot,scenario,ax)
Helper function to move the joints of the manipulator.
function helperRobotMove(path,robot,scenario,ax) for idx = 1:size(path,1) jointConfig = path(idx,:); move(robot,"joint",jointConfig) show3D(scenario,fastUpdate=true,Parent=ax,Collisions="on"); drawnow advance(scenario); end end
Version History
Introduced in R2022a