rottraj
Generate trajectories between orientation rotation matrices
Syntax
Description
Examples
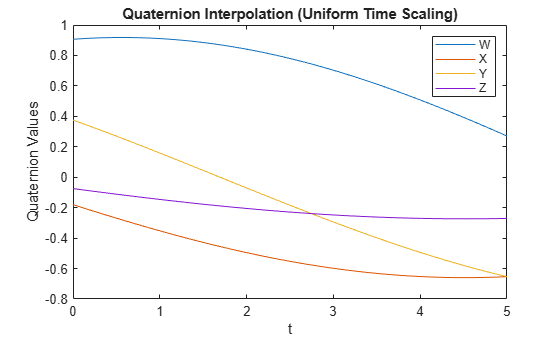
Define two quaternion waypoints to interpolate between.
q0 = quaternion([0 pi/4 -pi/8],'euler','ZYX','point'); qF = quaternion([3*pi/2 0 -3*pi/4],'euler','ZYX','point');
Specify a vector of times to sample the quaternion trajectory.
tvec = 0:0.01:5;
Generate the trajectory. Plot the results.
[qInterp1,w1,a1] = rottraj(q0,qF,[0 5],tvec); plot(tvec,compact(qInterp1)) title('Quaternion Interpolation (Uniform Time Scaling)') xlabel('t') ylabel('Quaternion Values') legend('W','X','Y','Z')
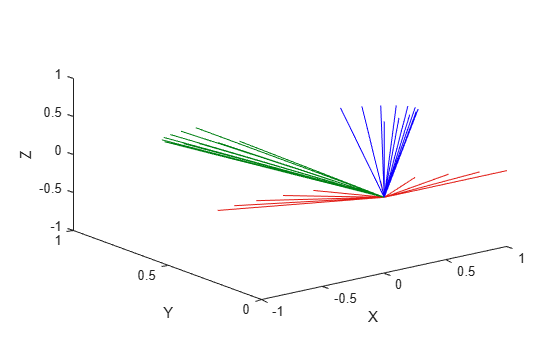
Define two rotation matrix waypoints to interpolate between.
r0 = [1 0 0; 0 1 0; 0 0 1]; rF = [0 0 1; 1 0 0; 0 0 0];
Specify a vector of times to sample the quaternion trajectory.
tvec = 0:0.1:1;
Generate the trajectory. Plot the results using plotTransforms. Convert the rotation matrices to quaternions and specify zero translation. The figure shows all the intermediate rotations of the coordinate frame.
[rInterp1,w1,a1] = rottraj(r0,rF,[0 1],tvec); rotations = rotm2quat(rInterp1); zeroVect = zeros(length(rotations),1); translations = [zeroVect,zeroVect,zeroVect]; plotTransforms(translations,rotations) xlabel('X') ylabel('Y') zlabel('Z')
Input Arguments
Name-Value Arguments
Output Arguments
Limitations
When specifying your
r0andrFinput arguments as a 3-by-3 rotation matrix, they are converted to aquaternionobject before interpolating the trajectory. If your rotation matrix does not follow a right-handed coordinate system or does not have a direct conversion to quaternions, this conversion may result in different initial and final rotations in the output trajectory.
References
[1] Dam, Erik B., Martin Koch, and Martin Lillholm. Quaternions, Interpolation and Animation. Technical Report DIKU-TR-98/5 (July 1998). http://web.mit.edu/2.998/www/QuaternionReport1.pdf
[2] Graf, Basile. Quaternions and Dynamics. arXiv:0811.2889 [math.DS] (2008). https://arxiv.org/pdf/0811.2889.pdf
[3] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
Extended Capabilities
Version History
Introduced in R2019aSee Also
bsplinepolytraj | contopptraj | cubicpolytraj | quinticpolytraj | transformtraj | trapveltraj | quaternion