bsplinepolytraj
Generate polynomial trajectories using B-splines
Description
[
generates a piecewise cubic B-spline trajectory that falls in the control polygon defined by
q,qd,qdd,pp] = bsplinepolytraj(controlPoints,tInterval,tSamples)controlPoints. The trajectory is uniformly sampled between the start
and end times given in tInterval. The function returns the positions,
velocities, and accelerations at the input time samples, tSamples. The
function also returns the piecewise polynomial pp form of the
polynomial trajectory with respect to time.
Examples
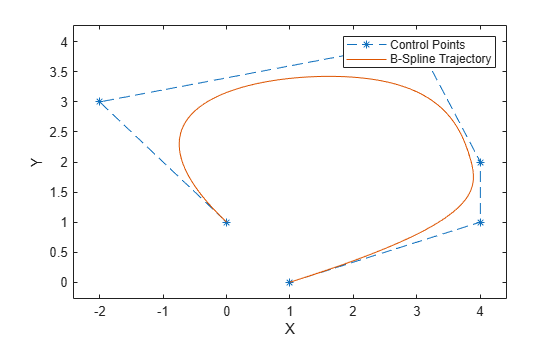
Use the bsplinepolytraj function with a given set of 2-D xy control points. The B-spline uses these control points to create a trajectory inside the polygon. The start and end time for the trajectory are also given.
cpts = [1 4 4 3 -2 0; 0 1 2 4 3 1]; tpts = [0 5];
Compute the B-spline trajectory. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and polynomial coefficients (pp) of the polynomial that achieves the waypoints using the control points.
tvec = 0:0.01:5; [q,qd,qdd,pp] = bsplinepolytraj(cpts,tpts,tvec);
Plot the results. Show the control points and the resulting trajectory inside them.
figure plot(cpts(1,:),cpts(2,:),'*--') hold on plot(q(1,:),q(2,:)) xlabel("X") ylabel("Y") legend("Control Points","B-Spline Trajectory") axis padded hold off
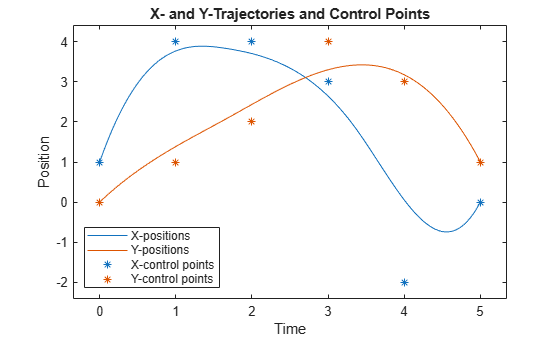
Plot the position of each element of the B-spline trajectory. These trajectories are cubic piecewise polynomials parameterized in time.
figure plot(tvec,q); hold on ax = gca; ax.ColorOrderIndex = 1; scatter([0:length(cpts)-1],cpts,'*') xlabel("Time") ylabel("Position") title("X- and Y-Trajectories and Control Points") axis padded legend("X-positions","Y-positions","X-control points","Y-control points",Location="southwest") hold off
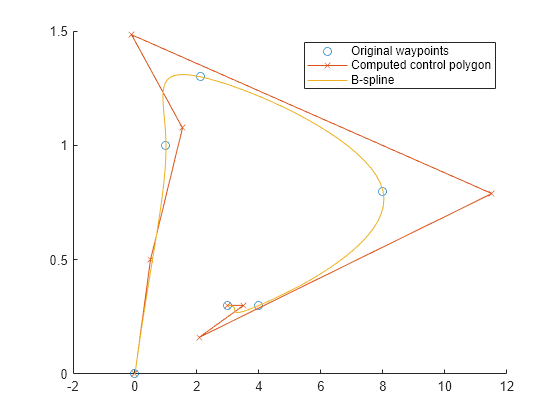
Create waypoints to interpolate with a B-Spline.
wpts1 = [0 1 2.1 8 4 3]; wpts2 = [0 1 1.3 .8 .3 .3]; wpts = [wpts1; wpts2]; L = length(wpts) - 1;
Form matrices used to compute interior points of control polygon
r = zeros(L+1, size(wpts,1)); A = eye(L+1); for i= 1:(L-1) A(i+1,(i):(i+2)) = [1 4 1]; r(i+1,:) = 6*wpts(:,i+1)'; end
Override end points and choose r0 and rL.
A(2,1:3) = [3/2 7/2 1]; A(L,(L-1):(L+1)) = [1 7/2 3/2]; r(1,:) = (wpts(:,1) + (wpts(:,2) - wpts(:,1))/2)'; r(end,:) = (wpts(:,end-1) + (wpts(:,end) - wpts(:,end-1))/2)'; dInterior = (A\r)';
Construct a complete control polygon and use bsplinepolytraj to compute a polynomial with the new control points
cpts = [wpts(:,1) dInterior wpts(:,end)]; t = 0:0.01:1; q = bsplinepolytraj(cpts, [0 1], t);
Plot the results. Show the original waypoints, the computed polygon, and the interpolated B-spline.
figure; hold all plot(wpts1, wpts2, 'o'); plot(cpts(1,:), cpts(2,:), 'x-'); plot(q(1,:), q(2,:)); legend('Original waypoints', 'Computed control polygon', 'B-spline');
[1] Farin, Section 9.1
Input Arguments
Output Arguments
References
[1] Farin, Gerald E. Curves and Surfaces for Computer Aided Geometric Design: A Practical Guide. San Diego, CA: Academic Press, 1993.
Extended Capabilities
Version History
Introduced in R2019a
See Also
contopptraj | cubicpolytraj | quinticpolytraj | rottraj | transformtraj | trapveltraj