Connectivity to ROS-Enabled Simulators
ROS Toolbox supports connectivity to ROS-enabled simulators for simulation and deployment of applications using MATLAB® and Simulink®. This page lists examples that demonstrate connectivity to these ROS-enabled simulators using ROS Toolbox.
Gazebo simulator
Unity® game engine
CARLA simulator
NVIDIA® Isaac Sim
You can design algorithms for perception, motion planning and control of robots and autonomous systems in MATLAB and Simulink and simulate them in the simulators before deploying the algorithms in a real-world environment.
ROS Toolbox acts as a middleware to establish networking between MATLAB and Simulink, and the ROS-enabled simulators. You can set up and connect to entities in the external simulators, and control them using the communication channels created using ROS Toolbox.
Topics
- Get Started with Gazebo and Simulated TurtleBot
Set up the Gazebo® simulator engine and further explore Gazebo with a simulated TurtleBot®.
- Set Up and Connect to Unity Game Engine
Set up and connect to Unity Game Engine using ROS Toolbox to simulate various robotic manipulator applications.
- Set Up and Connect to CARLA Simulator
Set up and connect to the CARLA simulator using ROS Toolbox to simulate autonomous driving applications.
- Set Up and Connect to NVIDIA Isaac Sim
Set Up and connect to NVIDIA Isaac Sim® application to simulate universal-scene-description-based (USD-based) 3-D workflows and applications.
Featured Examples

Add, Build, and Remove Objects in Gazebo
Explore more in-depth interaction with the Gazebo® Simulator from MATLAB, such as creating simple models, adding links and joints to models, connecting models together, and applying forces to bodies.

Apply Forces and Torques in Gazebo
A collection of ways to apply forces and torques to models in the Gazebo® simulator.

Test Robot Autonomy in Simulation
Explore MATLAB control of the Gazebo® Simulator.

Feedback Control of a ROS-Enabled Robot
Use Simulink to control a simulated robot running in a separate ROS-based simulator.
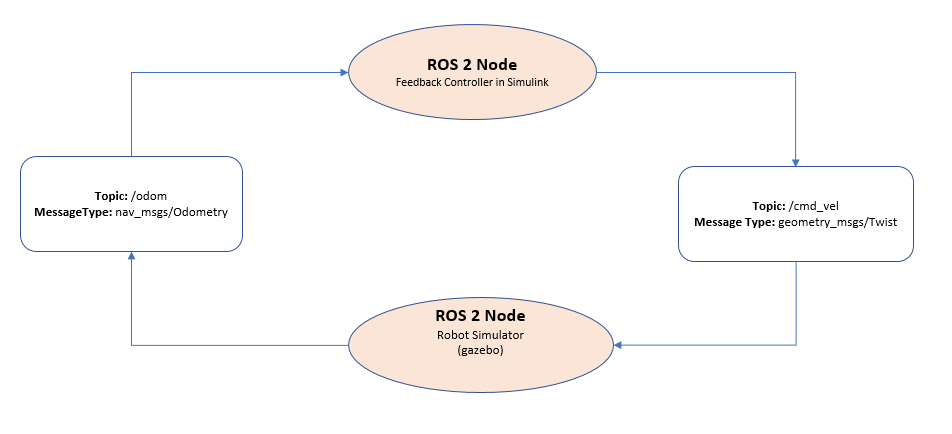
Feedback Control of a ROS-Enabled Robot over ROS 2
Use Simulink to control a simulated robot running in a Gazebo robot simulator over ROS 2 network.
Track and Follow an Object
Explore the autonomous behavior that incorporates the Kinect® camera, where the algorithm involves the TurtleBot looking for a blue ball and then staying at a fixed distance from the ball.

Control the TurtleBot with Teleoperation
Demonstrates keyboard control of the TurtleBot through the use of the
ExampleHelperTurtleBotCommunicator class.

Obstacle Avoidance with TurtleBot and VFH
Use a TurtleBot with Vector Field Histograms to perform obstacle avoidance when driving a robot in an environment.

Fusion of Radar and Lidar Data Using ROS
Perform track-level sensor fusion on recorded LiDAR sensor data for a driving scenario recorded on a rosbag.

Generate a ROS Control Plugin from Simulink
Generate and build a ros_control plugin from a Simulink model.
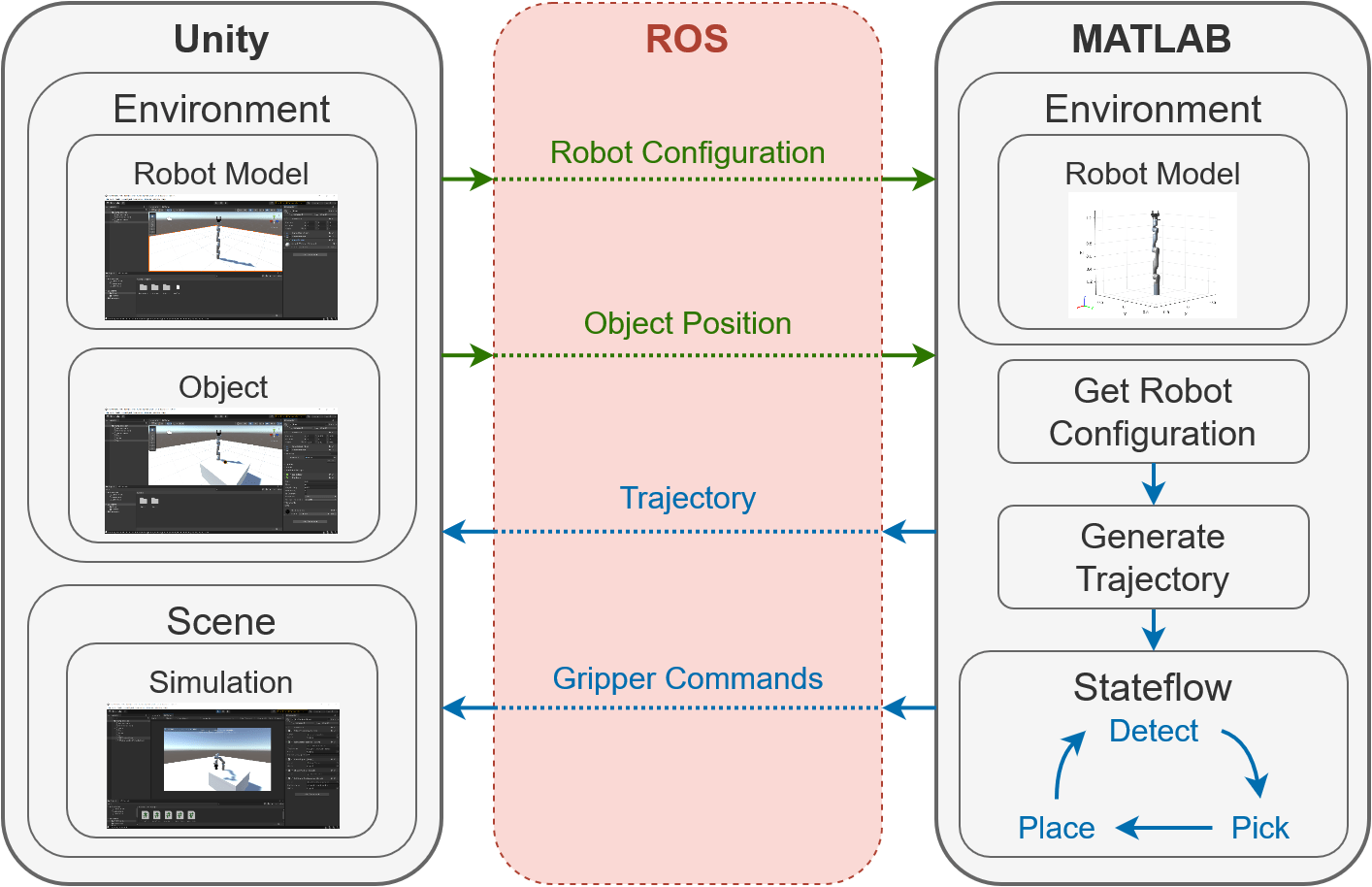
Pick-and-Place Workflow in Unity 3D Using ROS
Set up an end-to-end pick-and-place workflow for a robotic manipulator like the Kinova® Gen3, and simulate the robot in the Unity game engine.
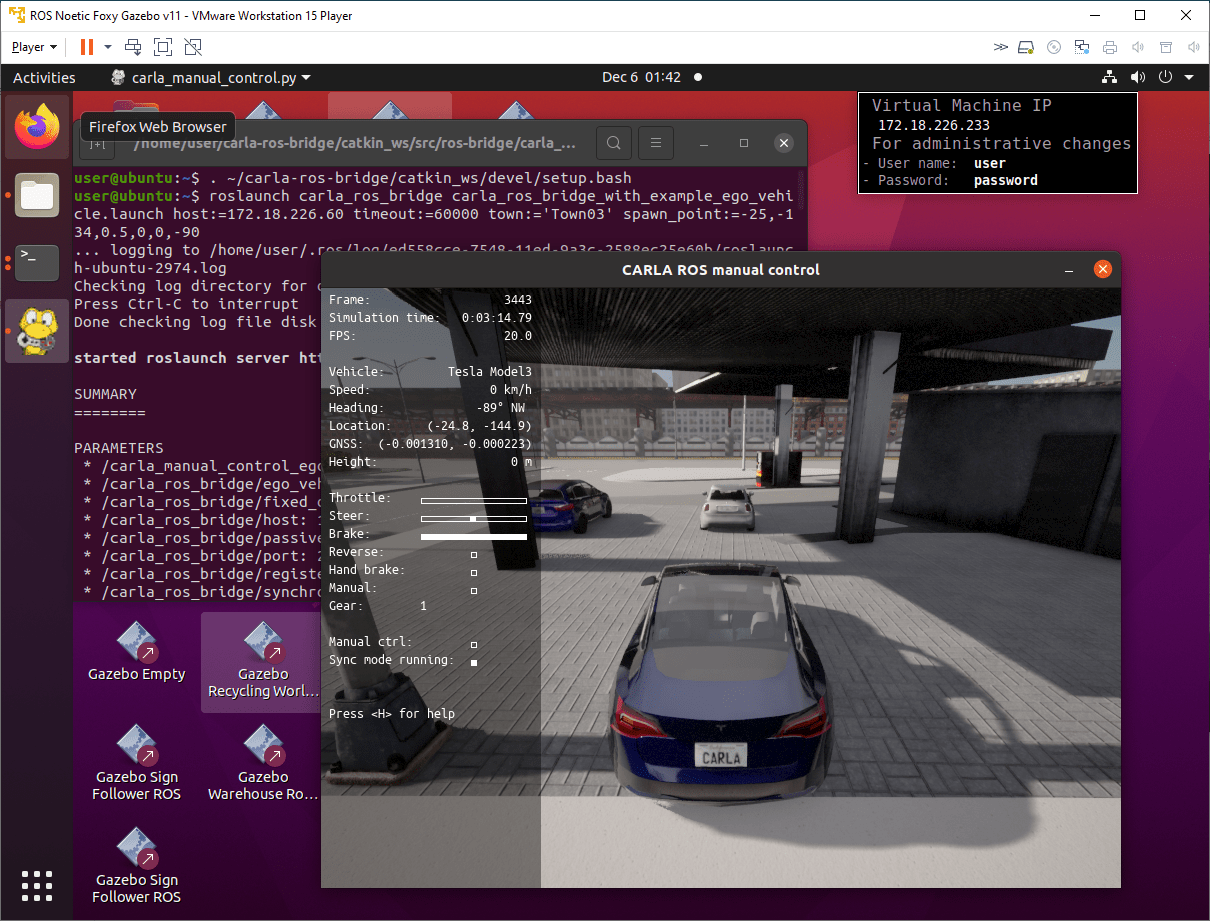
Emergency Braking of Ego Vehicle in CARLA Simulator Using Simulink and CARLA ROS Bridge
Emergency braking of ego vehicle in CARLA using Simulink.
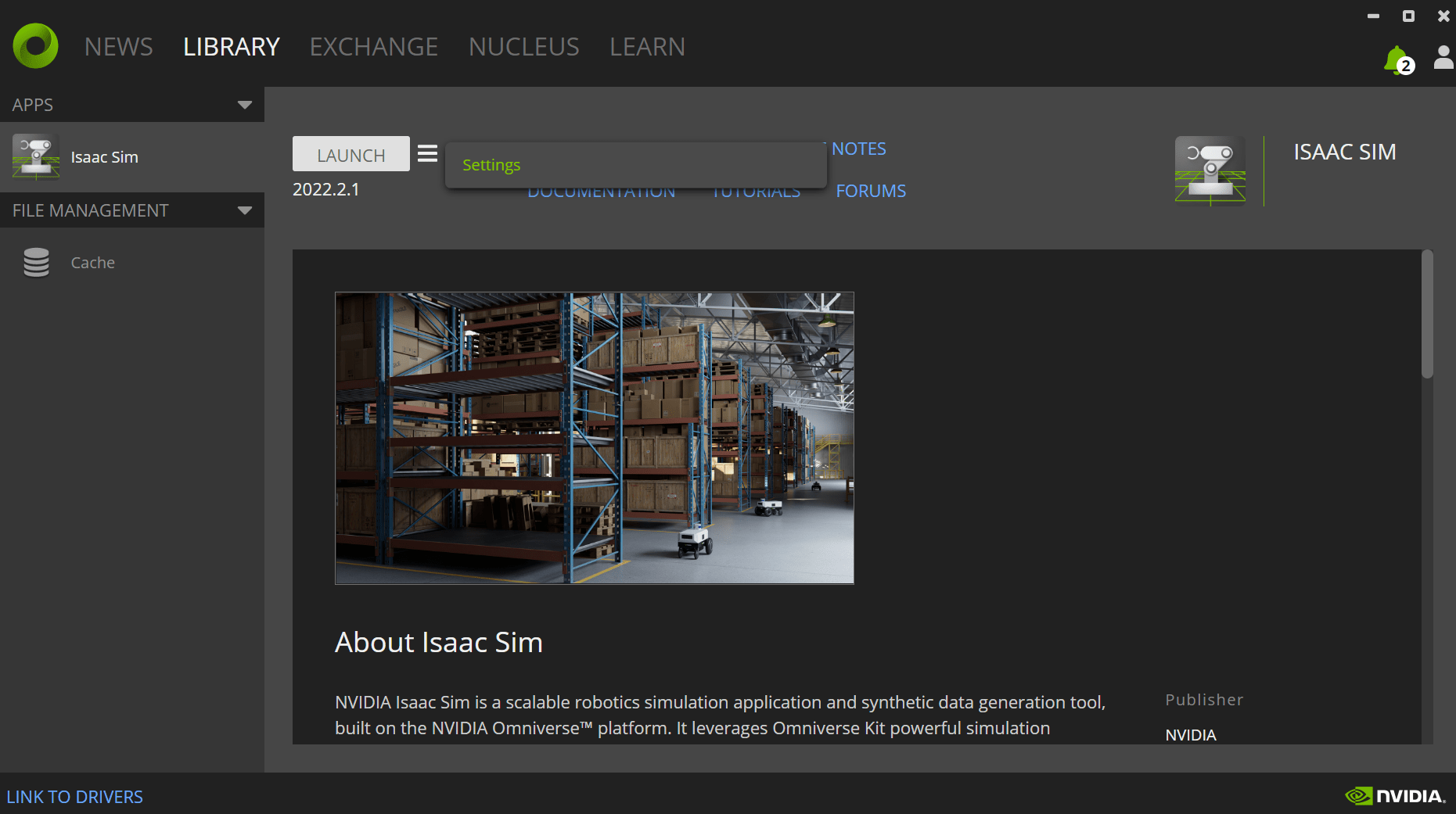
Control NVIDIA Carter Robot in Isaac Sim Using ROS 2
Publish ROS 2 messages from MATLAB to NVIDIA Carter robot and subscribe to the published topics.