Relative Angle Actuator (AB)
Ideal actuator that maintains relative angle between ports proportional to the input signal
Since R2026a

Libraries:
Simscape /
Foundation Library /
Rotational /
Sources
Description
The Relative Angle Actuator (AB) block represents an ideal actuator that maintains a specified relative angle between its ports regardless of the load at the connected ports.
B and F are angle-based rotational conserving ports. The physical signal at port S specifies the angle between the ports B and F. A positive signal at port S indicates that port F has a more positive angle than port B.
The block logs these variables:
t— torque that port B applies to port F to maintain the specified relative angular velocity.theta_rel— relative angle between the actuator ports, specified by the signal at port S, , where θB and θF are the angles of ports B and F, respectively.
For more information, see Data Logging.
Examples
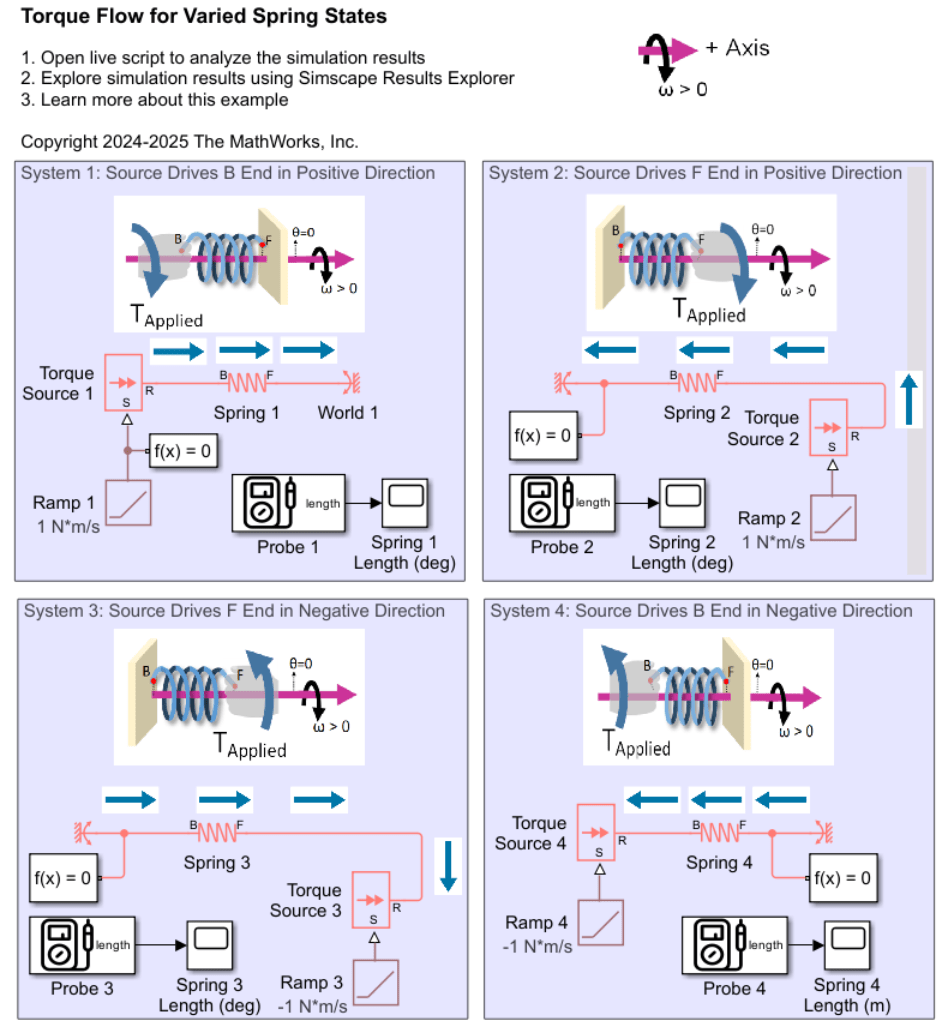
Interpreting Torque in the Angle-Based Rotational Domain
Describes how to interpret torques in a Simscape™ angle-based rotational network. It outlines the key concepts for understanding the signs of logged torques. It examines rotational spring systems driven by torque sources at different ends, as well as a rotational system of inertias, to illustrate the torque behavior.
Ports
Input
Conserving
Extended Capabilities
Version History
Introduced in R2026a