matchFeaturesInRadius
Find matching features within specified radius
Syntax
Description
indexPairs = matchFeaturesInRadius(features1,features2,points2,centerPoints,radius)
[
also returns the distance between the features in a matched pair in
indexPairs,matchMetric]
= matchFeaturesInRadius(___)indexPairs.
[
specifies options using one or more name-value arguments in addition of the input arguments
in previous syntaxes.indexPairs,matchMetric]
= matchFeaturesInRadius(___,Name,Value)
Examples
Load a MAT file containing an image and camera data into the workspace.
data = load('matchInRadiusData.mat');Convert the camera pose to extrinsics.
orientation = data.cameraPose2.Rotation; location = data.cameraPose2.Translation; [rotationMatrix,translationVector] = cameraPoseToExtrinsics(orientation,location);
Project the 3-D world points associated with feature set one onto the second image.
centerPoints = worldToImage(data.intrinsics,rotationMatrix,translationVector,data.worldPoints);
Match features between the two feature sets within spatial constraints.
indexPairs1 = matchFeaturesInRadius(data.features1,data.features2, ... data.points2,centerPoints,data.radius,'MatchThreshold',40, ... 'MaxRatio',0.9);
Match features between the two feature sets without using spatial constraints.
indexPairs2 = matchFeatures(data.features1,data.features2, ... 'MatchThreshold',40,'MaxRatio',0.9);
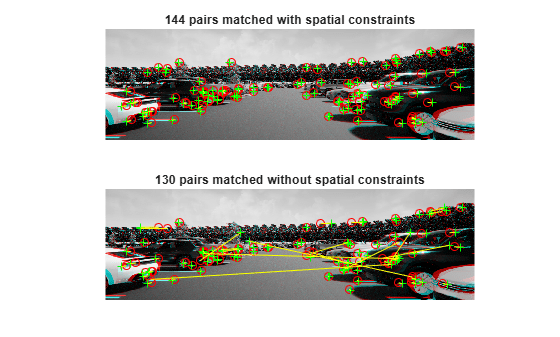
Visualize and compare the results between the two ways of matching features.
figure subplot(2,1,1) showMatchedFeatures(data.I1,data.I2,data.points1( ... indexPairs1(:,1)),data.points2(indexPairs1(:,2))); title(sprintf('%d pairs matched with spatial constraints',size(indexPairs1,1))); subplot(2,1,2) showMatchedFeatures(data.I1,data.I2,data.points1( ... indexPairs2(:,1)),data.points2(indexPairs2(:,2))); title(sprintf('%d pairs matched without spatial constraints',size(indexPairs2,1)));
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'Metric','SSD' specifies the sum of
squared differences metric for feature matching.
Matching threshold, specified as a scalar value in the range (0,100]. The default
values are 10.0 for binary feature vectors or
1.0 for nonbinary feature vectors. You can use the matching
threshold to select the strongest matches. The threshold represents a percent of the
distance from a perfect match.
Two feature vectors match when the distance between them is less than the
threshold set by 'MatchThreshold'. The function rejects a match
when the distance between the features is greater than the value of
'MatchThreshold'. Increase the value to return more
matches.
Inputs that are binaryFeatures objects typically require
a larger value for the match threshold. The extractFeatures function returns a binaryFeatures object when extracting FREAK, ORB, or BRISK
descriptors.
Ratio threshold, specified as a scalar value in the range (0, 1]. Use the ratio to reject ambiguous matches. Increase this value to return more matches.
Feature matching metric, specified as either 'SAD' or
'SSD'.
'SAD' | Sum of absolute differences |
'SSD' | Sum of squared differences |
This property applies when you specify the input feature sets,
features1 and features2, as matrices. When
you specify the features as binaryFeatures objects, the function uses
the Hamming distance to compute the similarity metric.
Unique matches, specified as a logical 0
(false) or 1 (true). Set
this value to true to return only unique matches between
features1 and features2.
When you set Unique to false, the function
returns all matches between features1 and
features2. Multiple features in features1
can match to one feature in features2.

When you set Unique to true,
the function performs a forward-backward match to select a unique match. After
matching features1 to features2, it matches
features2 to features1 and keeps the best
match.
Output Arguments
Indices of corresponding features between the two input feature sets, returned as a
P-by-2 matrix. Pis the number of matched pairs
of features. Each index pair corresponds to a matched feature between the
features1 and features2 inputs. The first
element indexes the feature in features1. The second element
indexes the matching feature in features2.

Distance between matching features, returned as a P-by-1 vector.
The ith element in matchMetric corresponds to
the ith row in the indexPairs output matrix. The
values of the distances are based on the metric selected, but a perfect match is always
0. When Metric is set to either
SAD or SSD, the feature vectors are normalized
to unit vectors before computation. The function returns
matchMetric as a double data type when
features1 and features2 are of type
double. Otherwise, the returned vector is of type
single.
Note
You cannot select the Hamming metric. The metric is selected automatically when
the features1 and features2 inputs are
binaryFeatures.
Data Types: single | double
Tips
Use this function when the 3-D world points that correspond to feature set one
features1, are known.centerPointscan be obtained by projecting a 3-D world point onto the second image. You can obtain the 3-D world points by triangulating matched image points from two stereo images.You can specify a circular area of points in feature set two to match with feature set one. Specify the origin as
centerPointswith a radius specified byradius. Specify the points to match from feature set two aspoints2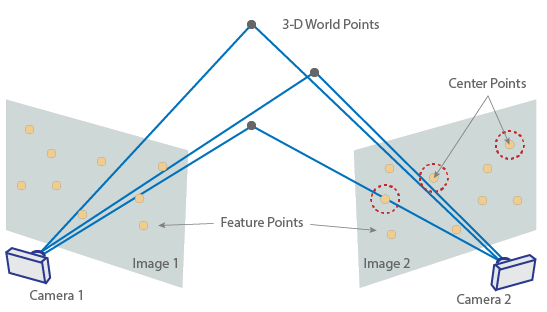 .
.
References
[1] Fraundorfer, Friedrich, and Davide Scaramuzza. “Visual Odometry: Part II: Matching, Robustness, Optimization, and Applications.” IEEE Robotics & Automation Magazine 19, no. 2 (June 2012): 78–90. https://doi.org/10.1109/MRA.2012.2182810.
[2] Lowe, David G. “Distinctive Image Features from Scale-Invariant Keypoints.” International Journal of Computer Vision 60, no. 2 (November 2004): 91–110. https://doi.org/10.1023/B:VISI.0000029664.99615.94.
[3] Muja, Marius, and David G. Lowe. “Fast Approximate Nearest Neighbors With Automatic Algorithm Configuration:” In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, 331–40. Lisboa, Portugal: SciTePress - Science and Technology Publications, 2009. https://doi.org/10.5220/0001787803310340.
[4] Muja, Marius, and David G. Lowe. "Fast Matching of Binary Features." In 2012 Ninth Conference on Computer and Robot Vision, 404–10. New York: Institute of Electrical and Electronics Engineers, 2012. https://doi.org/10.1109/CRV.2012.60.
Extended Capabilities
Version History
Introduced in R2021a
See Also
Functions
showMatchedFeatures|extractFeatures|detectHarrisFeatures|detectSURFFeatures|detectORBFeatures|detectFASTFeatures|detectBRISKFeatures|detectMinEigenFeatures|estimateFundamentalMatrix|estimateGeometricTransform|detectMSERFeatures|estimateWorldCameraPose|worldToImage