Active Disturbance Rejection Controllers for Speed Control of a PMSM
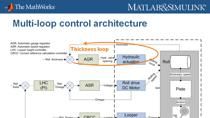
Learn how to implement active disturbance rejection control (ADRC) on a Texas Instruments® C2000™ processor for PMSM speed control. ADRC estimates and compensates for system uncertainties in real time, providing disturbance rejection performance similar to PID controllers but with less tuning effort. This model-free control technique is suitable for addressing challenges when tuning controllers such as uncertain or unmodeled system dynamics and operating regions, sudden load changes, and input voltage fluctuations. Watch the design and implementation process of ADRC using a prebuilt Simulink® block, demonstrating its benefits over PID controllers in the context of PMSM speed control applications.
Published: 2 Apr 2023

Featured Product