Proportional Motor Control During Obstacle Detection | Getting Started with VEX Robotics Using MATLAB and Simulink, Part 6
From the series: Getting Started with VEX Robotics Using MATLAB and Simulink
Gary Garber, BU Academy, Boston, MA
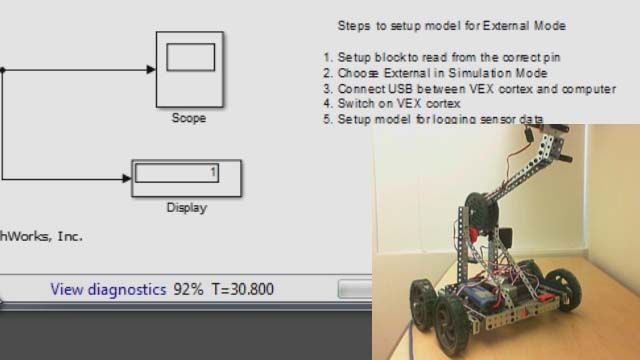
Learn to use a simple proportional (P) controller in Simulink® to precisely control the motion of a robot during an obstacle detection course. The intended behavior of the robot is to slow down, and eventually stop, as it gets closer to the obstacle in front of it that is sensed by the ultrasonic sensor. This is a good use case for robots that need to be positioned in precise locations during an autonomous challenge and thus avoid slipping or skidding due to abrupt stops of the motor.
Download the curriculum materials.
Learn more about software and training resources for the VEX Robotics competition.
Published: 28 Dec 2016