lowpass
Lowpass-filter signals
Syntax
Description
y = lowpass(x,wpass)x using a lowpass filter with
normalized passband frequency wpass in units of
π rad/sample. lowpass uses a
minimum-order filter with a stopband attenuation of 60 dB and compensates for
the delay introduced by the filter. If x is a matrix, the
function filters each column independently.
y = lowpass(___,Name=Value)
[
also returns the y,d] = lowpass(___)digitalFilter object
d used to filter the input.
lowpass(___) with no output arguments plots
the input signal and overlays the filtered signal.
Examples
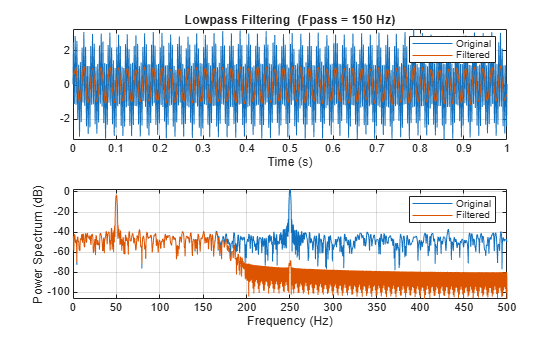
Create a signal sampled at 1 kHz for 1 second. The signal contains two tones, one at 50 Hz and the other at 250 Hz, embedded in Gaussian white noise of variance 1/100. The high-frequency tone has twice the amplitude of the low-frequency tone.
fs = 1e3; t = 0:1/fs:1; x = [1 2]*sin(2*pi*[50 250]'.*t) + randn(size(t))/10;
Lowpass-filter the signal to remove the high-frequency tone. Specify a passband frequency of 150 Hz. Display the original and filtered signals, and also their spectra.
lowpass(x,150,fs)
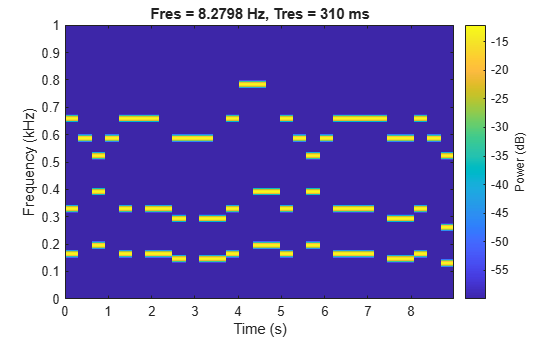
Implement a basic digital music synthesizer and use it to play a traditional song. Specify a sample rate of 2 kHz. Plot the spectrogram of the song.
fs = 2e3; t = 0:1/fs:0.3-1/fs; fq = [-Inf -9:2]/12; note = @(f,g) [1 1 1]*sin(2*pi*440*2.^[fq(g)-1 fq(g) fq(f)+1]'.*t); mel = [5 3 1 3 5 5 5 0 3 3 3 0 5 8 8 0 5 3 1 3 5 5 5 5 3 3 5 3 1]+1; acc = [5 0 8 0 5 0 5 5 3 0 3 3 5 0 8 8 5 0 8 0 5 5 5 0 3 3 5 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)
Lowpass-filter the signal to separate the melody from the accompaniment. Specify a passband frequency of 450 Hz. Plot the original and filtered signals in the time and frequency domains.
long = lowpass(song,450,fs);
% To hear, type sound(long,fs)
lowpass(song,450,fs)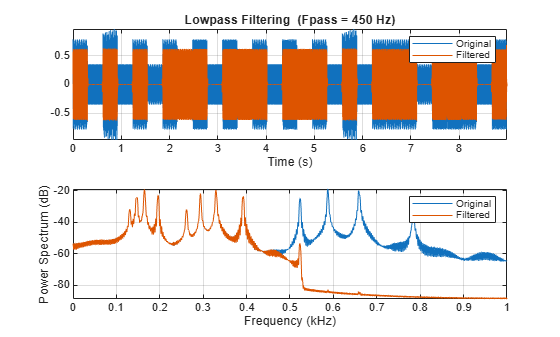
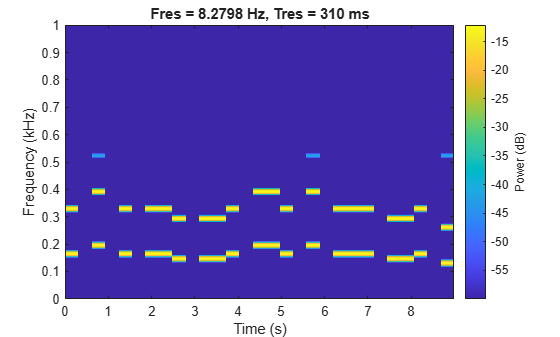
Plot the spectrogram of the accompaniment.
figure pspectrum(long,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)
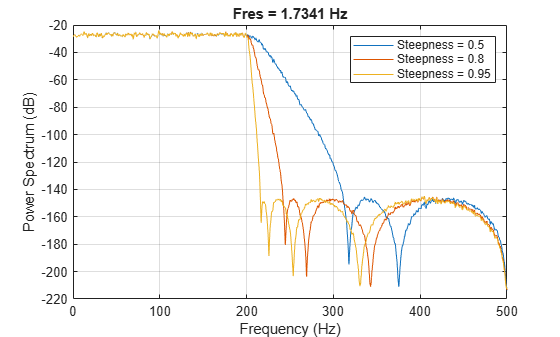
Filter white noise sampled at 1 kHz using an infinite impulse response lowpass filter with a passband frequency of 200 Hz. Use different steepness values. Plot the spectra of the filtered signals.
fs = 1000; x = randn(20000,1); [y1,d1] = lowpass(x,200,fs,ImpulseResponse="iir",Steepness=0.5); [y2,d2] = lowpass(x,200,fs,ImpulseResponse="iir",Steepness=0.8); [y3,d3] = lowpass(x,200,fs,ImpulseResponse="iir",Steepness=0.95); pspectrum([y1 y2 y3],fs) legend("Steepness = " + [0.5 0.8 0.95])
Compute and plot the frequency responses of the filters.
[h1,f] = freqz(d1,1024,fs);
[h2,~] = freqz(d2,1024,fs);
[h3,~] = freqz(d3,1024,fs);
plot(f,mag2db(abs([h1 h2 h3])))
legend("Steepness = " + [0.5 0.8 0.95])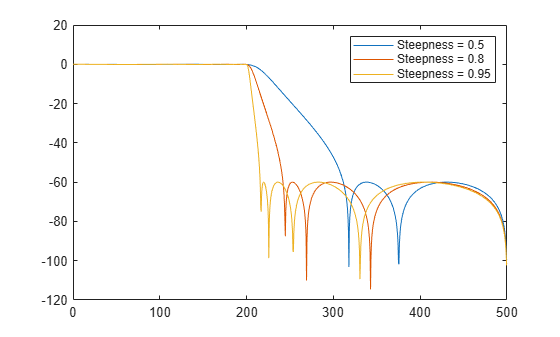
Input Arguments
Name-Value Arguments
Output Arguments
More About
Version History
Introduced in R2018a
See Also
Apps
Functions
bandpass|bandstop|designfilt|filter|filtfilt|fir1|highpass| Lowpass FIR | Lowpass IIR