read
Syntax
Description
Add-On Required: This feature requires the Lidar Toolbox Support Package for SICK Lidar Sensors add-on.
ptCloud = read(slObj)sicklidar object
slObj.
If the object is streaming, then the function returns the oldest point cloud data available in the buffer at the time of the function call, then continues streaming.
If the object is not streaming and the buffer contains point clouds, the function returns the oldest point cloud from the buffer. If the buffer does not contain point clouds, the function starts streaming to obtain point cloud data, returns the data, and then stops streaming.
ptCloud = read(slObj,"all")sicklidar object
slObj.
If the object is streaming, then this syntax returns all existing point clouds in the buffer at the time of the function call. After acquiring them, the object deletes them from the buffer, then continues streaming.
If the object is not streaming and the buffer contains point clouds, then this syntax returns all available point clouds and the object deletes them from the buffer. If the object is not streaming and the buffer does not contain point clouds, then this syntax returns an empty array.
[
additionally returns a structure, ptCloud,timeStamp,pcAttributes] = read(___)pcAttributes, containing attributes
for each point in the point clouds.
Examples
Create a sicklidar object. Ensure that you specify the correct IP address for your sensor.
slObj = sicklidar(IPAddress="192.168.0.112");Read point cloud data from the object buffer using the read object function. Because slObj is not currently streaming and the buffer contains no point clouds, the read function starts streaming, reads a point cloud, and then stops streaming.
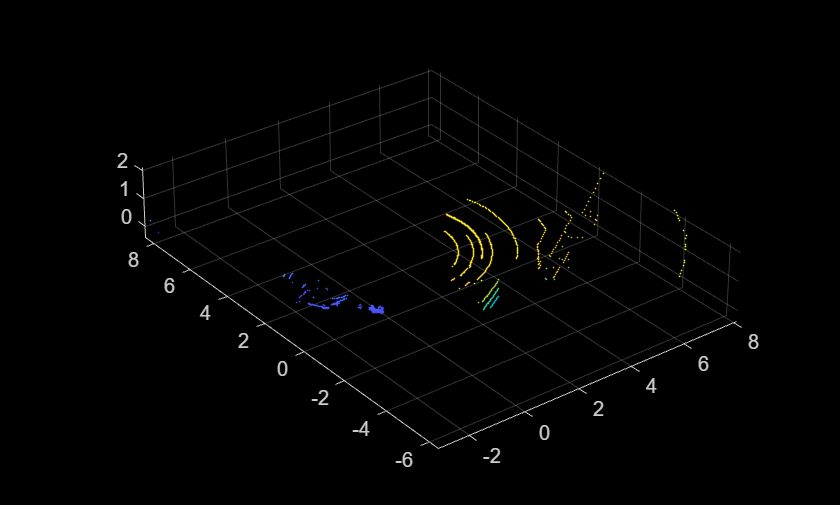
ptCloud = read(slObj);
Display the point cloud using the pcshow function.
pcshow(ptCloud)
You can read point clouds from a SICK 3-D lidar sensor by streaming data into the sicklidar object buffer using the start object function, and then reading point clouds from the object buffer.
Create a sicklidar object. Ensure that you specify the correct IP address for your sensor.
slObj = sicklidar(IPAddress="192.168.0.112");Start streaming point cloud data from the connected sensor into the object buffer.
start(slObj);
Wait for 10 seconds, then stop streaming data from the sensor.
pause(10) stop(slObj);
Display the number of point clouds available in the buffer.
fprintf("Number of available point clouds in the object buffer = %d\n",slObj.NumPointClouds)Number of available point clouds in the object buffer = 69
Read the oldest 10 point clouds from the buffer, then display the number of point clouds remaining in the buffer. Note that the "oldest" mode does not discard the unread point clouds from the buffer.
ptCloudOldest = read(slObj,10,"oldest"); fprintf("Number of available point clouds after reading the oldest point clouds = %d\n",slObj.NumPointClouds)
Number of available point clouds after reading the oldest point clouds = 59
Now, read the five most recent point clouds from the buffer, and verify that the "latest" mode discards the remaining point clouds from the buffer after reading.
ptCloudLatest = read(slObj,5,"latest");Warning: Reading the latest point clouds will remove older point clouds in the sicklidar buffer.
fprintf("Number of available point clouds after reading the latest point clouds = %d\n",slObj.NumPointClouds)Number of available point clouds after reading the latest point clouds = 0
Input Arguments
Output Arguments
Version History
Introduced in R2026a
See Also
sicklidar | sicklidar2d | start | preview | closePreview | flush | stop