Proceedings
Featured Presentations

Mouham Tanimou, Robert Bosch
Micha Muenzenmay, Robert Bosch
Micha Muenzenmay, Robert Bosch


Keynote Presentations
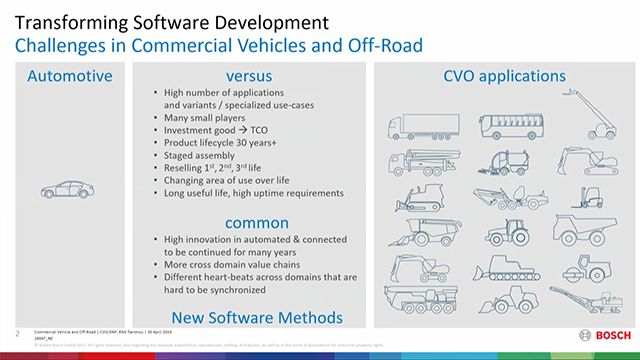
Mouham Tanimou, Robert Bosch
Micha Muenzenmay, Robert Bosch
Micha Muenzenmay, Robert Bosch

General Sessions


Mark Danielsen, MathWorks




ADAS and Automated Driving



AI in Engineering

Tackling Fleet Test Data with MATLAB
Will Wilson, MathWorks

Reinforcement Learning: Leveraging Deep Learning for Controls
Aditya Baru, MathWorks

Applying Artificial Intelligence to Product Development
Arvind Jayaraman, MathWorks
Full Vehicle Simulation


Full Vehicle Simulation for Electrified Powertrain Selection
Mike Sasena, MathWorks
Kevin Oshiro, MathWorks

Virtual Design of Electrified Powertrain Systems
Javier Gazzarri, MathWorks
Dakai Hu, MathWorks
Dakai Hu, MathWorks

Objective Drivability Calibration
Jason Rodgers, MathWorks